
חברת OpenThread שהושקה על ידי Google נוידה למספר מכשירים ופלטפורמות על ידי צוות OpenThread, ספקי סיליקון והקהילה. במאגר OpenThread נכללות דוגמאות build לכל הפלטפורמות שהועברו.
במאמר ספקי חיפוש מופיעה רשימה של כל הפלטפורמות ויציאות הקהילה שנתמכות בספקים.
תמיכה
התמיכה בכל פלטפורמה משתנה עם הזמן. חלק מהפלטפורמות מתויגות ברמת התמיכה הנוכחית כפי שזוהה על ידי צוות OpenThread. פלטפורמות ללא תיוג לא נבדקו לאחרונה ועשויות להיחשב כפלטפורמות עם 'תמיכה מוגבלת'.
| רמת תמיכה | תיאור |
|---|---|

|
תמיכה מלאה ובסיסית, בנוסף לכל רכיב Thread Certified Component שמשתמש ב-OpenThread. רבות מהפלטפורמות האלה נבדקו ושימשו את צוות OpenThread, ומומלץ להשתמש בהן בהדגמות וב-Codelabs שלנו. |

|
הפלטפורמות האלה לא נבדקו במלואן ויכול להיות שחסרות בהן חלק פונקציונליות עיקרית. |

|
אין תמיכה בשלב הזה וייתכן שיהיו בעיות בהפעלת OpenThread. השימוש הוא על אחריותך בלבד. |
ארכיטקטורת המערכת

OpenThread תוכנן מתוך מחשבה על ניידות וגמישות. הקוד הוא נייד מסוג C/C++ (C99 ו-C++11), שלא מאפשר ארכיטקטורה של המערכת בגלל שכבת הפשטה צרה. שכבת ההפשטה הזו מאפשרת ל-OpenThread לפעול על מתכת חשופה או על מערכת הפעלה. עד כה, הוכח ש-OpenThread פועל ב-FreeRTOS, ב-RIOT-OS, ב-Zephyr OS, ב-Linux וב-macOS.
האופי הנייד של OpenThread לא מטיל הנחות לגבי תכונות הפלטפורמה. OpenThread מספק את החלקים הבעייתיים לשימוש בתכונות מתקדמות של רדיו וקריפטו, ומפחית את דרישות המערכת כמו זיכרון, קוד ומחזורי מחשוב. אפשר לעשות זאת לכל פלטפורמה, תוך שמירה על האפשרות להשתמש בהגדרות ברירת מחדל.
ל-OpenThread יש מערכת build ניתנת להגדרה שבאמצעותה המפתח יכול להפעיל או להשבית תכונות לפי הצורך. מעבר לשרשרת הכלים של GNU ברירת המחדל, המקור תוכנן לעבוד עם מספר רשתות כלים פופולריות אחרות כמו IAR ו-Visual Studio.
עיצובי פלטפורמות
ב-OpenThread יש תמיכה גם בתכנון של מערכת על שבב (SoC) וגם בתכנון של מעבד מידע משותף ברשת (NCP).
SoC הוא פתרון עם שבב יחיד שכולל שילוב של RFIC (802.15.4 במקרה של Thread) ומעבד, שבהם OpenThread ושכבת האפליקציה פועלים במעבד המקומי.
עיצוב NCP הוא המקום שבו שכבת האפליקציה פועלת במעבד מארח ומתקשרת עם OpenThread דרך חיבור טורי באמצעות פרוטוקול סטנדרטי לבקרת מארחים שנקרא Spinel. בעיצוב הזה, OpenThread יכול לפעול ברדיו או במעבד המארח.
Single-Chip, Thread-Only (SoC)
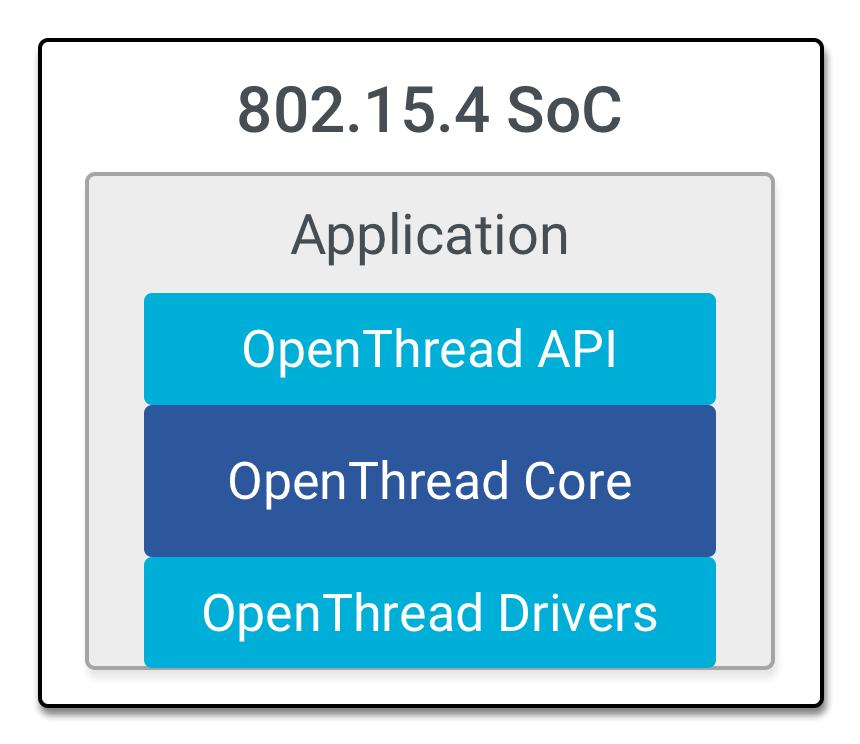
בעיצוב הזה, שכבת האפליקציה ו-OpenThread פועלים באותו מעבד. האפליקציה משתמשת ישירות בממשקי ה-API של OpenThread ובסטאק IPv6.
זהו עיצוב ה-SoC הנפוץ ביותר למכשירי קצה. מכיוון שהוא משולב מאוד בסיליקון יחיד, יש לו את העלות הנמוכה ביותר ואת צריכת החשמל הנמוכה ביותר.
One-Chip, Multi-Interface (SoC)
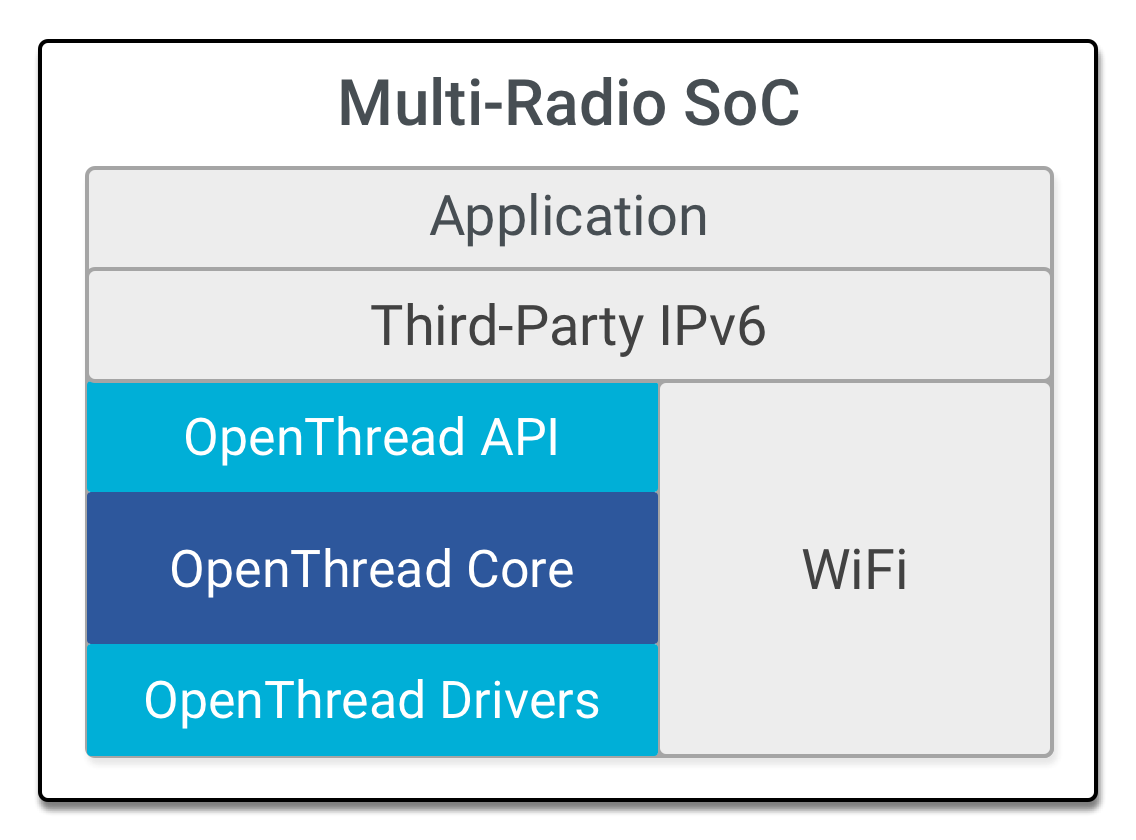
אם ל-SoC יש כמה מכשירי רדיו, כמו 802.15.4 ו-Wi-Fi, או 802.15.4 ו-Bluetooth עם צריכת אנרגיה נמוכה (BLE), שכבת האפליקציה ו-OpenThread עדיין פועלים באותו מעבד. בעיצוב של מספר ממשקים, OpenThread משתמש בסטאק IPv6 המשותף של צד שלישי באמצעות ממשק של גרם נתונים גולמי של IPv6.
עיצובים של מעבדי מידע שותפים
ב-OpenThread יש תמיכה בתכנון של Radio Co-Processor (RCP) ו-Network Co-Processor (NCP). למידע נוסף קראו את המאמר עיצובים של מעבדי מידע שותפים.
בעיות בפלטפורמה
הבעיות הבאות פתוחות כרגע בפלטפורמות OpenThread: