
OpenThread released by Google has been ported to several devices and platforms by the OpenThread team, silicon vendors, and the community. Build examples for all ported platforms are included in the OpenThread repository.
See Search Vendors for a searchable list of all vendor-supported platforms and community ports.
Support
Support for each platform varies over time. Some platforms are tagged with the current level of support as identified by the OpenThread team. Untagged platforms have not been recently tested and may be considered as having "Limited Support."
| Support Level | Description |
|---|---|

|
Full and basic support, as well as any Thread Certified Component that uses OpenThread. Many of these platforms have been tested and used by the OpenThread team, and are recommended for use in our demos and Codelabs. |

|
These platforms have not been fully tested and may be missing some key functionality. |

|
Not currently supported and may have issues running OpenThread. Use at your own risk. |
System architecture
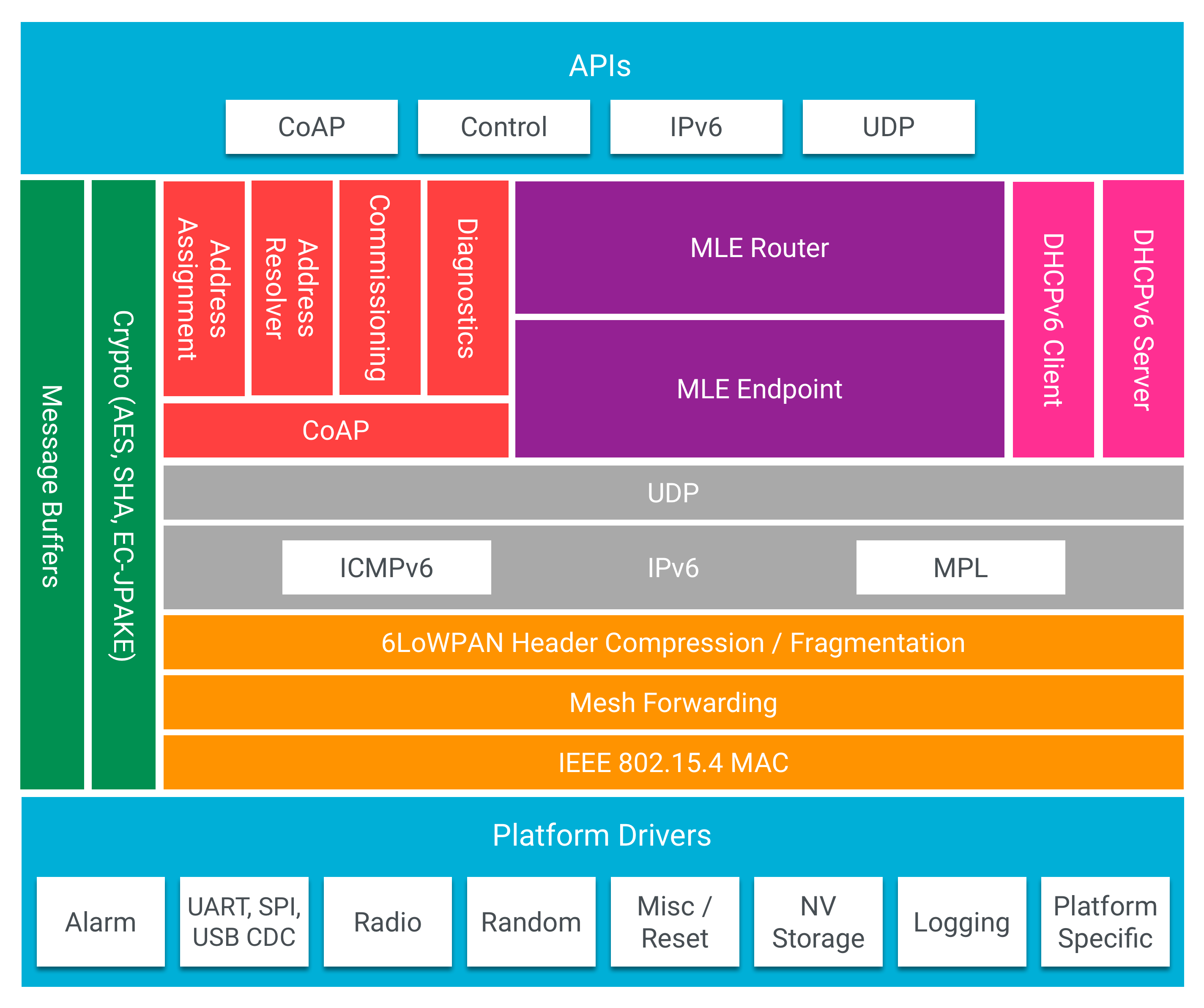
OpenThread is designed with portability and flexibility in mind. The code is portable C/C++ (C99 and C++11) that’s system architecture-agnostic due to a narrow abstraction layer. This abstraction layer means that OpenThread can run on either bare-metal or an OS. To date, OpenThread has been demonstrated to run on FreeRTOS, RIOT-OS, Zephyr OS, Linux, and macOS.
OpenThread's portable nature makes no assumptions about platform features. OpenThread provides the hooks to utilize enhanced radio and crypto features, reducing system requirements, such as memory, code, and compute cycles. This can be done per platform, while retaining the ability to default to a standard configuration.
OpenThread has a configurable build system with which a developer can enable or disable features as needed. Beyond the default GNU toolchain, the source is designed to work with a number of other popular toolchains like IAR and Visual Studio.
Platform designs
OpenThread supports both system-on-chip (SoC) and network co-processor (NCP) designs.
An SoC is a single-chip solution that has the combined RFIC (802.15.4 in the case of Thread) and processor, where OpenThread and the application layer run on the local processor.
An NCP design is where the application layer runs on a host processor and communicates with OpenThread via a serial connection using a standardized host-controller protocol we call Spinel. In this design, OpenThread can run on either the radio or host processor.
Single-Chip, Thread-Only (SoC)
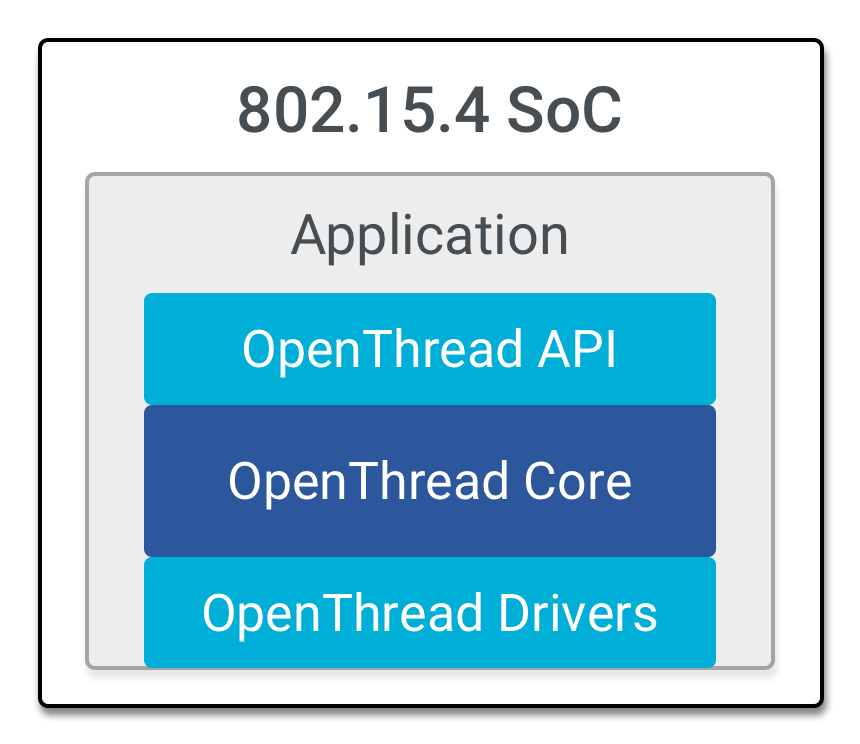
In this design, the application layer and OpenThread run on the same processor. The application directly uses the OpenThread APIs and IPv6 stack.
This is the SoC design most commonly used for end devices. Because it is highly integrated into a single silicon, it has the lowest cost and lowest power consumption.
Single-Chip, Multiple-Interface (SoC)
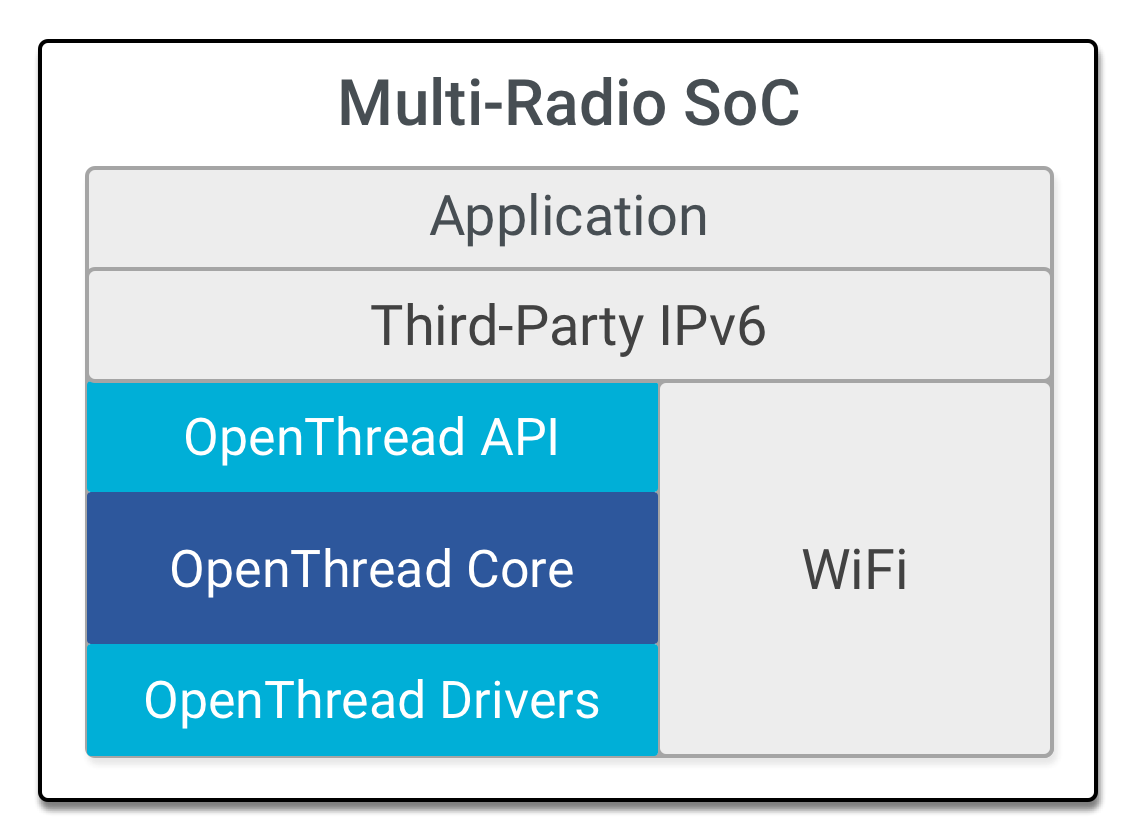
When a SoC has multiple radios, such as 802.15.4 and Wi-Fi, or 802.15.4 and Bluetooth Low Energy (BLE), the application layer and OpenThread still run on the same processor. In the multiple-interface design, OpenThread leverages the shared third-party IPv6 stack via a raw IPv6 datagram interface.
Co-Processor Designs
OpenThread supports Radio Co-Processor (RCP) and Network Co-Processor (NCP) designs. For more information, refer to Co-Processor Designs.
Open platform issues
The following issues are currently open for OpenThread platforms: