
1. はじめに

OpenThread は、Thread® ネットワーキング プロトコルのオープンソース実装です。これは、モノのインターネット(IoT)デバイス向けに設計された堅牢で安全なワイヤレス メッシュ ネットワーキング プロトコルです。OpenThread は Google の Nest チームによって開発され、オープンソース プロジェクトとしてデベロッパー コミュニティに無料で提供されています。
Thread 仕様は、スマートホームや商業ビルでよく見られるリソース制約のあるデバイス向けに、信頼性が高く、安全で、エネルギー効率の高いワイヤレス通信プロトコルを確立します。OpenThread には、IPv6、6LoWPAN、MAC セキュリティ付き IEEE 802.15.4、メッシュリンクの確立、メッシュ ルーティングなど、Thread 内のネットワーク レイヤのスコープ全体が含まれています。
Telink は OpenThread 実装を Zephyr RTOS に統合し、Telink ハードウェアとのシームレスな互換性を実現しました。この統合のソースコードは GitHub で簡単に入手でき、ソフトウェア開発キット(SDK)としても提供されています。
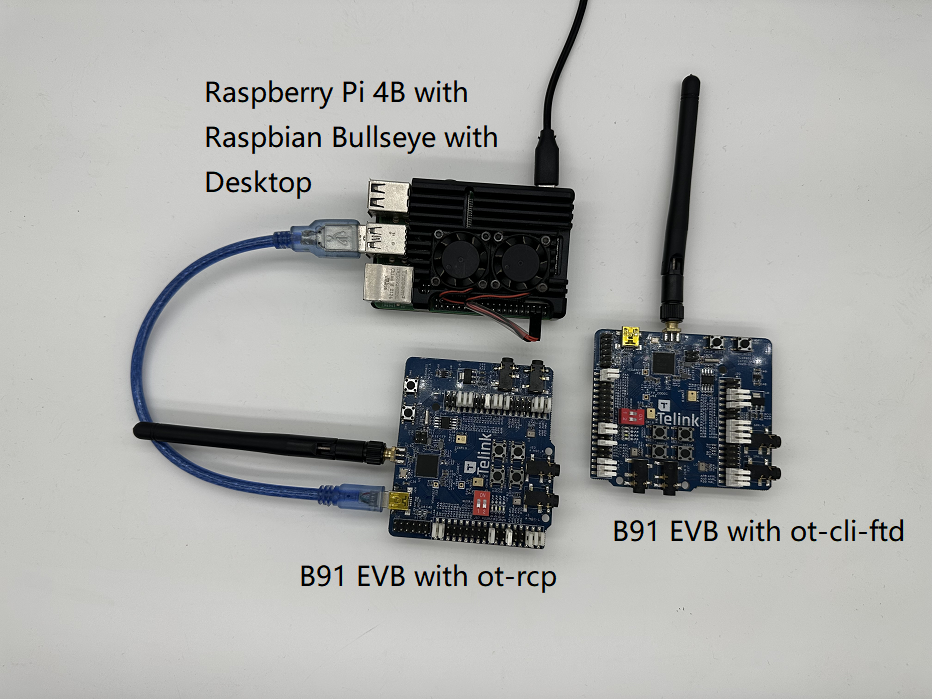
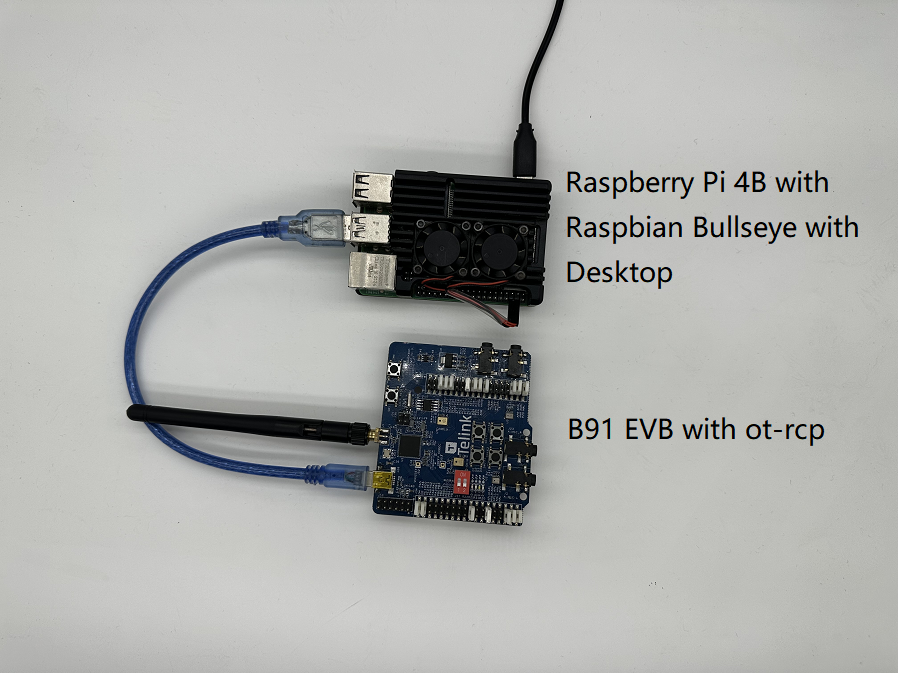
この Codelab では、実際のハードウェアで OpenThread をプログラミングし、Thread ネットワークを作成して管理し、ノード間でメッセージを交換します。下の図は、Codelab の OT Border Router(OTBR)と 1 つの Thread デバイスを含むハードウェア設定を示しています。
学習内容
- Telink Zephyr 開発環境を使用して OpenThread 実装を設定します。
- OpenThread CLI サンプル(
ot-cli-ftdとot-rcp)をビルドして、Telink B91 開発ボードに書き込む。 - Raspberry Pi 3B+ 以降で Docker を使用して OpenThread Border Router(OTBR)を設定します。
- OTBR で Thread ネットワークを作成するには:
- アウトオブバンド デバッグを使用して Thread ネットワークにデバイスを追加する。
- CLI を使用して Thread ネットワーク内のノード間の接続を検証します。
必要なもの
ハードウェア:
- 2 つの B91 開発ボード。
- Raspbian OS イメージがインストールされた Raspberry Pi 3B+ 以降。
- USB ポートが 2 つ以上ある Linux マシン。
- インターネットに接続されたスイッチ(またはルーター)と複数のイーサネット ケーブル。
ソフトウェア:
- Telink Burning and Debugging Tool(LinuxBDT)。
- PuTTY などのシリアルポート ターミナル ツール。
- Git や West などの他のツール。
2. 前提条件
Thread のコンセプトと OpenThread CLI
この Codelab の前に、OpenThread シミュレーション Codelab を通して、基本的な Thread のコンセプトと OpenThread CLI に慣れておくことをおすすめします。
Linux マシン
Linux マシン(Ubuntu v20.04 LTS 以降)は、Telink Zephyr 開発環境をセットアップし、すべての Thread 開発ボードをフラッシュするためのビルドマシンとして機能します。これらのタスクを実行するには、Linux マシンに 2 つの空き USB ポートとインターネット接続が必要です。
シリアルポートの接続とターミナル
デバイスを Linux マシンの USB ポートに直接接続できます。また、デバイスにアクセスするにはシリアルポート ターミナル ツールが必要です。
この Codelab では、ターミナル ツール PuTTY を使用して FTD Joiner と Raspberry Pi を制御します。この Codelab では を使用して説明しますが、その他のターミナル ソフトウェアも使用できます。
Telink B91 Development Kit
この Codelab では、2 セットの B91 開発キットが必要です。下の写真は、1 セットに必要な最小限のコンポーネントを示しています。
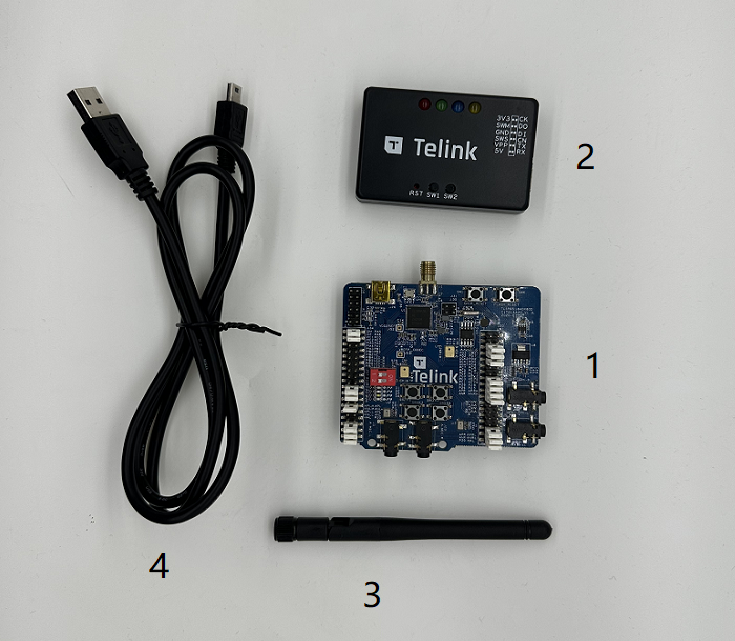
これらのキットの 1 つは RCP(Radio Co-Processor)として使用され、もう 1 つは FTD(Full Thread Device)として機能します。キットをお持ちでない場合は、Telink の公式ウェブサイトで詳細をご確認ください。使用するコンポーネントは次のとおりです。
インデックス | 名前 |
1 | Telink B91 開発ボード |
2 | Telink Burning Board |
3 | 2.4Ghz アンテナ |
4 | USB ケーブル(USB A - ミニ USB) |
Raspbian OS イメージを搭載した Raspberry Pi 3B+ 以降
この Codelab では、Raspbian Bullseye Lite OS イメージまたは Raspbian Bullseye with Desktop を搭載した Raspberry Pi 3B+ 以降が必要です。イーサネット経由でインターネットに接続され、OpenThread Border Router(OTBR)のホストとして構成されます。
ネットワーク接続
インターネットに接続されたスイッチ(またはルーター)と複数のイーサネット ケーブル。これらは Raspberry Pi を Linux マシンに接続するために使用され、ホスト経由で Raspberry Pi のユーザー構成を容易にします。
LinuxBDT
Telink Burning and Debugging Tool(BDT)は、すべての Telink チップシリーズに適用され、Telink B91 開発ボードで OpenThread ファームウェアを消去してフラッシュできます。Linux マシンに X86 ベースの Linux バージョン linuxBDT をインストールします。
その他
- Telink Zephyr 開発環境の設定に使用する Git。
- West: Zephyr プロジェクトの管理と OpenThread バイナリのビルドに使用します。
3. ファームウェアを設定する
Telink Zephyr 開発環境をセットアップする
Linux マシンで CLI ターミナルを開き、次のコマンドを実行して APT が最新の状態であることを確認します。
$ sudo apt update $ sudo apt upgrade
完了したら、次の手順に進みます。
- 依存関係をインストールします。
$ wget https://apt.kitware.com/kitware-archive.sh $ sudo bash kitware-archive.sh $ sudo apt install --no-install-recommends git cmake ninja-build \ gperf ccache dfu-util device-tree-compiler python3-dev python3-pip \ python3-setuptools python3-tk python3-wheel xz-utils file make gcc \ gcc-multilib g++-multilib libsdl2-dev
$ cmake --version $ python3 --version $ dtc --version
- west をインストールします。
$ pip3 install --user -U west $ echo 'export PATH=~/.local/bin:"$PATH"' >> ~/.bashrc $ source ~/.bashrc
~/.local/binが$PATH環境変数に含まれていることを確認します。 - Zephyr Project のソースコードを取得します。
$ west init ~/zephyrproject $ cd ~/zephyrproject $ west update $ west blobs fetch hal_telink $ west zephyr-export
- Zephyr 用の追加の Python 依存関係をインストールします。
$ pip3 install --user -r ~/zephyrproject/zephyr/scripts/requirements.txt
- Zephyr ツールチェーンを設定します。Zephyr ツールチェーン(約 1 ~ 2 GB)をローカル ディレクトリにダウンロードして、ほとんどのボードをフラッシュできるようにします。
$ wget https://github.com/zephyrproject-rtos/sdk-ng/releases/download/v0.16.1/zephyr-sdk-0.16.1_linux-x86_64.tar.xz $ wget -O - https://github.com/zephyrproject-rtos/sdk-ng/releases/download/v0.16.1/sha256.sum | shasum --check --ignore-missing
$HOME/zephyr-sdk[-x.y.z] $HOME/.local/zephyr-sdk[-x.y.z] $HOME/.local/opt/zephyr-sdk[-x.y.z] $HOME/bin/zephyr-sdk[-x.y.z] /opt/zephyr-sdk[-x.y.z] /usr/zephyr-sdk[-x.y.z] /usr/local/zephyr-sdk[-x.y.z]
$ tar xvf zephyr-sdk-0.16.1_linux-x86_64.tar.xz $ cd zephyr-sdk-0.16.1 $ ./setup.sh -t riscv64-zephyr-elf -h -c
- Hello World の例をビルドします。まず、Hello World の例を使用して、公式の Zephyr プロジェクト構成が正しいことを確認してから、カスタム プロジェクトの設定に進みます。
$ cd ~/zephyrproject/zephyr $ west build -p auto -b tlsr9518adk80d samples/hello_world
zephyr.binという名前のファームウェアはbuild/zephyr directoryにあります。 - Zephyr 環境スクリプトを
~/.bashrcに追加します。次のコマンドを実行します。$ echo "source ~/zephyrproject/zephyr/zephyr-env.sh" >> ~/.bashrc $ source ~/.bashrc
- Telink Zephyr リモート リポジトリを追加します。Telink リポジトリをローカルに開発ブランチとしてダウンロードして更新します。
$ cd ~/zephyrproject/zephyr $ git remote add telink-semi https://github.com/telink-semi/zephyr $ git fetch telink develop $ git checkout develop $ west update $ west blobs fetch hal_telink
詳しくは、Zephyr Doc – Getting Started Guide をご覧ください。
Telink LinuxBDT をセットアップする
Telink LinuxBDT ツールをダウンロードし、Linux マシンのローカル ディレクトリ(ホーム ディレクトリ ~ など)に抽出して、B91 開発ボードにファームウェアを書き込めるようにします。
$ cd ~ $ wget http://wiki.telink-semi.cn/tools_and_sdk/Tools/BDT/LinuxBDT.tar.bz2 $ tar -vxf LinuxBDT.tar.bz2
Burning Board を USB インターフェース経由で Linux マシンに接続し、次のコマンドを入力します。
$ cd LinuxBDT $ sudo ./bdt lsusb -v Bus 002 Device 001: ID 1d6b:0003 xHCI Host Controller Bus 001 Device 003: ID 0bda:565a Integrated_Webcam_HD Bus 001 Device 023: ID 413c:301a Dell MS116 USB Optical Mouse Bus 001 Device 037: ID 248a:826a Telink Web Debugger v3.6 Bus 001 Device 001: ID 1d6b:0002 xHCI Host Controller
「Telink Web Debugger v3.6」というメッセージが表示された場合は、BDT プログラマーが Linux マシンに正常に接続されています。
ファームウェアのコンパイル
この Codelab では、次の 2 種類の OpenThread ファームウェアをビルドします。
ot-cli-ftd- と
ot-rcp。
コンパイル方法は次のとおりです。
- ラジオ コプロセッサ(
ot-rcp)$ cd ~/zephyrproject $ rm -rf build_ot_coprocessor $ west build -b tlsr9518adk80d -d build_ot_coprocessor zephyr/samples/net/openthread/coprocessor -- -DDTC_OVERLAY_FILE="usb.overlay" -DOVERLAY_CONFIG=overlay-rcp-usb-telink.conf
- 対話型コマンドラインを備えたフル機能の Thread デバイス(
ot-cli-ftd)$ cd ~/zephyrproject $ rm -rf build_ot_cli_ftd $ west build -b tlsr9518adk80d -d build_ot_cli_ftd zephyr/samples/net/openthread/cli -- -DOVERLAY_CONFIG=overlay-telink-fixed-mac.conf -DCONFIG_OPENTHREAD_FTD=y
ファームウェアの書き込み
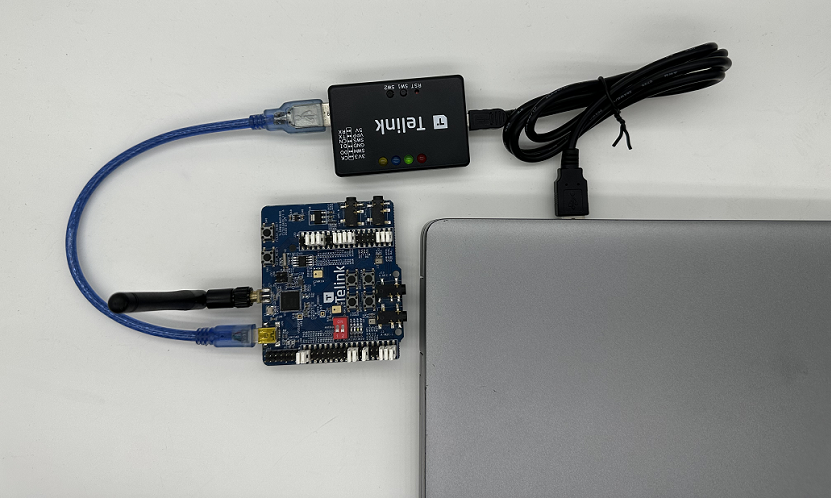
下の図に示すように、USB ケーブルを使用して B91 開発ボードを Burning Board に接続します。
コマンドラインで次のコマンドを実行して、ファームウェアの書き込みを行います(ot-cli-ftd ファームウェアのフラッシュを例として使用)。
$ cd ~/zephyrproject/build_ot_cli_ftd/zephyr $ cp zephyr.bin ~/LinuxBDT/bin/ot-cli-ftd.bin $ cd ~/LinuxBDT $ sudo ./bdt 9518 ac Activate OK! $ sudo ./bdt 9518 wf 0 -i bin/ot-cli-ftd.bin EraseSectorsize... Total Time: 2181 ms Flash writing... [100%][-] [##################################################] File Download to Flash at address 0x000000: 491700 bytes Total Time: 30087 ms
ot-rcp のフラッシュ メソッドは、基本的に ot-cli-ftd のフラッシュ メソッドと同じです。ただし、ファームウェアのパスと名前には違いがあります。
フラッシュ後、2 つの B91 開発ボードを区別するために、それぞれにマークを付けます。ot-cli-ftd でフラッシュされたボードに「FTD Joiner」、ot-rcp でフラッシュされたボードに「RCP」というラベルを付けます。
4. FTD Joiner デバイスのシリアル コンソールを構成する
図に示すように、FTD Joiner を Linux マシンの USB ポートに直接接続します。
FTD Joiner Device を Linux マシンに接続したら、PuTTY を開きます。次に、新しいターミナルを作成し、シリアルポート情報を設定して、シリアルポートを開きます。
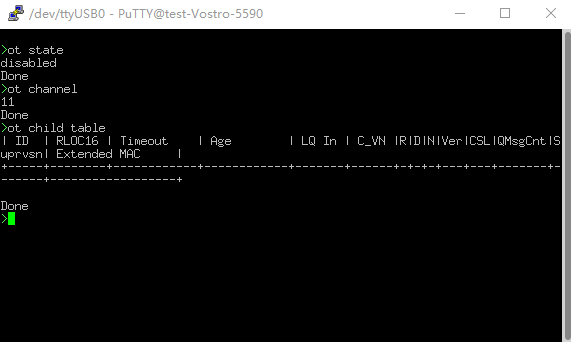
OpenThread コマンドライン リファレンスは、OpenThread CLI リファレンスにあります。すべてのコマンドの先頭に ot を付けるようにしてください。
例:
> ot state disabled Done > ot channel 11 Done >
5. Raspberry Pi を OpenThread ボーダー ルーターとして設定する
OpenThread ボーダー ルーターは、次の 2 つの主要部分で構成されるデバイスです。
- Raspberry Pi には、ボーダー ルーター(BR)として機能するために必要なすべてのサービスとファームウェアが含まれています。
- RCP は Thread 通信を担当します。
ラジオ コプロセッサ(RCP)
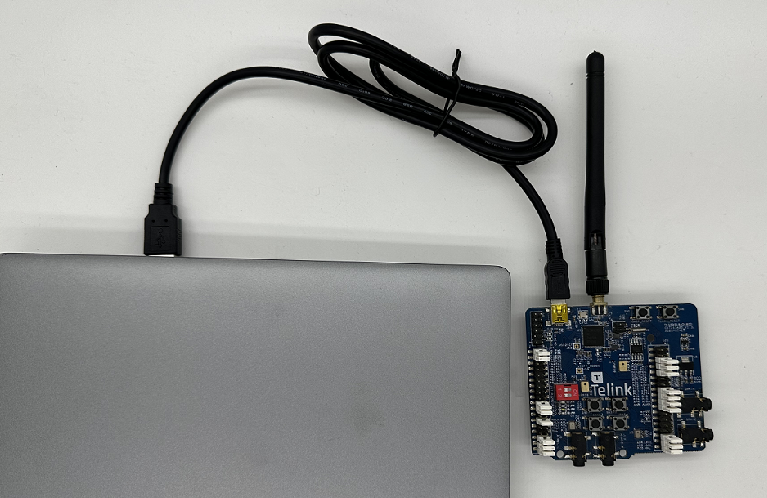
ot-rcp ファームウェアを書き込むには、ot-cli-ftd ファームウェアの書き込みプロセスと同じ手順を行います。下の図に示すように、B91 開発ボードを Raspberry Pi の USB ポートに接続します。
Raspberry Pi
- Raspbian Bullseye Lite OS イメージまたは Raspbian Bullseye with Desktop が SD カードに正しく書き込まれていることを確認します。
- Raspberry Pi に SSH で接続するか、Raspbian Desktop を直接操作するかを選択できます。この Codelab では SSH を使用します。
- 次のステップで OTBR Docker をインストールする前に、必ずローカル リポジトリとパッケージ マネージャーを更新してください。
$ sudo apt-get update $ sudp apt-get upgrade
Docker のインストール
前の手順でローカル リポジトリとパッケージ マネージャー APT を更新した場合は、Raspberry Pi を再起動してから SSH ターミナル ウィンドウを開きます。
- Docker をインストールします。
$ curl -sSL https://get.docker.com | sh
- 現在のユーザーを Docker グループに追加して権限を付与し、各コマンドの前に
sudoを追加する必要がないようにします。$ sudo usermod -aG docker $USER
- Docker が起動していない場合は、起動します。
$ sudo dockerd
- OTBR ファイアウォール スクリプトは、Docker コンテナ内にルールを生成します。その前に、
modprobeを実行して iptables のカーネル モジュールを読み込みます。$ sudo modprobe ip6table_filter
Docker を構成して実行する
この Codelab では、OpenThread Docker Hub から OTBR Docker イメージを直接 pull します。このイメージは OpenThread チームによってテストされ、検証されています。
- 最新のイメージを pull します。
$ docker pull openthread/otbr:latest
- Docker コンテナのイメージリストを確認します。
$ docker images REPOSITORY TAG IMAGE ID CREATED SIZE openthread/otbr latest db081f4de15f 6 days ago 766MB
/devを確認して RCP デバイスのシリアルポート名を特定します。ttyACM0は RCP が正しく接続されていることを示します。$ ls /dev/tty* ... /dev/ttyACM0 ...
- OTBR Docker を初めて実行し、RCP のシリアルポート(
ttyACM0)を参照します。この OTBR Docker を引き続き使用する場合は、コマンド docker start otbr を使用します。$ docker run --name "otbr" --sysctl "net.ipv6.conf.all.disable_ipv6=0 net.ipv4.conf.all.forwarding=1 net.ipv6.conf.all.forwarding=1" -p 8080:80 --dns=127.0.0.1 -it --volume /dev/ttyACM0:/dev/ttyACM0 --privileged openthread/otbr --radio-url spinel+hdlc+uart:///dev/ttyACM0
- 新しい SSH ターミナル ウィンドウを開いて、Raspberry Pi と RCP 間の接続をテストします。
$ docker exec -ti otbr sh -c "sudo ot-ctl" > state disabled Done
省略可能な Docker コマンド:
- 実行中の Docker コンテナに関する情報を取得します。
$ docker ps -aq
- OTBR Docker を停止します。
$ docker stop otbr
- OTBR Docker を削除します。
$ docker rm otbr
- OTBR Docker を再読み込みします。
$ docker restart otbr
この時点で、FTD Joiner デバイスと OTBR の準備が整い、次のステップに進んで Thread ネットワークを構築できます。
6. Thread ネットワークを作成する
RCP で Thread ネットワークを作成する
OTBR で ot-ctl シェルを使用して Thread ネットワークを確立します。前のセクションでシェルを終了した場合は、次のコマンドを入力して SSH ターミナルでシェルを再度起動します。
$ docker exec -ti otbr sh -c "sudo ot-ctl"
次に、表に指定された順序でコマンドを入力し、各ステップで期待される結果が得られたことを確認してから、次のステップに進みます。
インデックス | コマンド | はじめに | 想定される回答 | ||
1 |
| 新しいランダム ネットワーク データセットを作成します。 | 完了 | ||
2 |
| 新しいデータセットを不揮発性ストレージの Active Operational Dataset に commit します。 | 完了 | ||
3 |
| IPv6 インターフェースを起動します。 | 完了 | ||
4 |
| Thread プロトコルの動作を有効にして、Thread ネットワークに接続します。 | 完了 | ||
スレッド インターフェースが起動するまで 10 秒待ちます。 | |||||
5 |
| デバイスの状態を確認します。このコマンドは、リーダーになり、次のステップに進むまで複数回呼び出すことができます。 | leader | ||
6 |
| 完全なアクティブ オペレーショナル データセットを確認し、ネットワーク キーを記録します。 | Active Timestamp: 1 | ||
ot-cli-ftd デバイスがこの Thread ネットワークに参加するときには、ネットワークの作成時に OTBR によってランダムに生成されたネットワーク キーが使用されます。
アウトオブバンド コミッショニングで FTD Joiner を Thread に追加する
アウトオブバンド コミッショニングとは、ネットワークに参加するデバイスに、ワイヤレス以外の方法(OpenThread CLI での手動入力など)でネットワーク認証情報を送信することを指します。FTD Joiner のシリアル コンソールで、次のコマンドを順番に入力します。
インデックス | コマンド | はじめに | 想定されるレスポンス | ||
1 |
| デバイスが Thread ネットワークに接続するには、ネットワーク キーのみが必要です。 | 完了 | ||
2 |
| 新しいデータセットを不揮発性ストレージの Active Operational Dataset に commit します。 | 完了 | ||
3 |
| IPv6 インターフェースを起動します。 | 完了 | ||
4 |
| Thread プロトコルの動作を有効にして、Thread ネットワークに接続します。 | 完了 | ||
デバイスが参加して構成されるまで 20 秒ほど待ちます。 | |||||
5 |
| デバイスの状態を確認します。 | child/router | ||
トポロジ
SSH ターミナルで ipaddr、child table、router table などのコマンドを入力すると、次のコード スニペットのようなレスポンスが返されます。
> ipaddr rloc fd8c:60bc:a98:c7ba:0:ff:fe00:b000 Done > child table | ID | RLOC16 | Timeout | Age | LQ In | C_VN |R|D|N|Ver|CSL|QMsgCnt|Suprvsn| Extended MAC | +-----+--------+------------+------------+-------+------+-+-+-+---+---+-------+-------+------------------+ | 1 | 0xb001 | 240 | 23 | 3 | 51 |1|1|1| 3| 0 | 0 | 129 | 82bc12fbe783468e | Done > router table | ID | RLOC16 | Next Hop | Path Cost | LQ In | LQ Out | Age | Extended MAC | Link | +----+--------+----------+-----------+-------+--------+-----+------------------+------+ | 44 | 0xb000 | 63 | 0 | 0 | 0 | 0 | 7ae354109d611f7e | 0 | Done ... > child table | ID | RLOC16 | Timeout | Age | LQ In | C_VN |R|D|N|Ver|CSL|QMsgCnt|Suprvsn| Extended MAC | +-----+--------+------------+------------+-------+------+-+-+-+---+---+-------+-------+------------------+ Done > router table | ID | RLOC16 | Next Hop | Path Cost | LQ In | LQ Out | Age | Extended MAC | Link | +----+--------+----------+-----------+-------+--------+-----+------------------+------+ | 33 | 0x8400 | 63 | 0 | 3 | 3 | 13 | e61487c1cda940a6 | 1 | | 44 | 0xb000 | 63 | 0 | 0 | 0 | 0 | 7ae354109d611f7e | 0 | Done
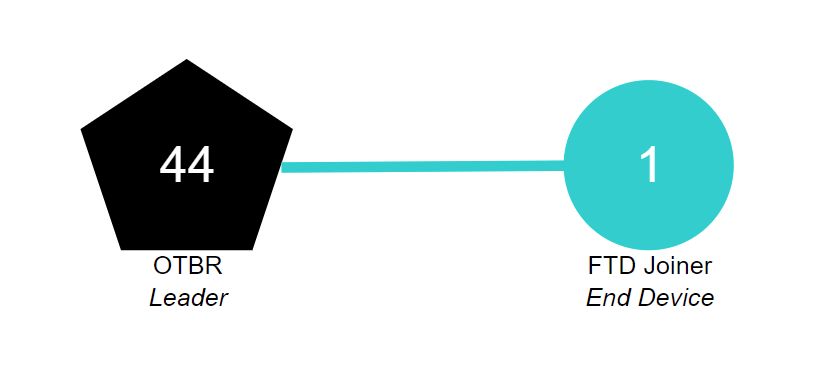
OTBR の RLOC16 は 0xb000 で、FTD Joiner の RLOC16 は最初は 0xb001 です。その後、FTD Joiner の RLOC16 は、ルーター ID を取得すると 0x8400 になります。FTD Joiner が子からルーターにアップグレードされていることがわかります。
現在の Thread ネットワークには 2 つのノードが含まれており、トポロジは下の図のようになっています。
7. Thread デバイス間の通信
ICMPv6 通信
ping コマンドを使用して、同じネットワーク内の Thread デバイスが相互に通信できるかどうかを確認します。まず、ipaddr コマンドを使用してデバイスの RLOC を取得します。
> ipaddr fd8c:60bc:a98:c7ba:0:ff:fe00:fc11 fdbd:7274:649c:1:1d19:9613:f705:a5af fd8c:60bc:a98:c7ba:0:ff:fe00:fc10 fd8c:60bc:a98:c7ba:0:ff:fe00:fc38 fd8c:60bc:a98:c7ba:0:ff:fe00:fc00 fd8c:60bc:a98:c7ba:0:ff:fe00:b000 # Routing Locator (RLOC) fd8c:60bc:a98:c7ba:5249:34ab:26d1:aff6 fe80:0:0:0:78e3:5410:9d61:1f7e Done
FTD Joiner のシリアル コンソールで次のコマンドを入力して、ping オペレーションを実行します。
> ot ping fd8c:60bc:a98:c7ba:0:ff:fe00:b000 16 bytes from fd8c:60bc:a98:c7ba:0:ff:fe00:b000: icmp_seq=1 hlim=64 time=19ms 1 packets transmitted, 1 packets received. Packet loss = 0.0%. Round-trip min/avg/max = 19/19.0/19 ms. Done
シリアルポートの出力レスポンスは、OTBR 側が ping リクエストを受信し、FTD Joiner が OTBR から返された ping レスポンスを受信したことを示しています。2 つのデバイス間の通信が成功している。
UDP 通信
OpenThread が提供するアプリケーション サービスには UDP も含まれます。UDP API を使用すると、Thread ネットワーク内のノード間で情報を渡したり、ボーダー ルーターを介して外部ネットワークに情報を渡したりできます。OpenThread の UDP API の詳細については、OpenThread CLI - UDP の例をご覧ください。この Codelab では、その API の一部を使用して、OTBR と FTD Joiner の間で情報を送信します。
まず、OTBR の Mesh-Local EID を取得します。このアドレスは Thread デバイスの IPv6 アドレスの 1 つでもあり、同じ Thread ネットワーク パーティション内の Thread デバイスにアクセスするために使用できます。
> ipaddr mleid fd8c:60bc:a98:c7ba:5249:34ab:26d1:aff6 Done
SSH ターミナルで次のコマンドを入力して、OTBR UDP を有効にし、デバイスの 1022 ポートをバインドします。
> udp open Done > udp bind :: 1022 Done
シリアル コンソールで次のコマンドを入力し、FTD Joiner の UDP を有効にします。デバイスの 1022 ポートをバインドし、5 バイトの hello メッセージを OTBR に送信します。
> ot udp open Done > ot udp bind :: 1022 Done > ot udp send fd8c:60bc:a98:c7ba:5249:34ab:26d1:aff6 1022 hello Done
SSH ターミナルに次の情報が出力されます。OTBR は FTD Joiner から hello メッセージを受信します。これは、UDP 通信が成功したことを意味します。
> 5 bytes from fd8c:60bc:a98:c7ba:9386:63cf:19d7:5a61 1022 hello
8. 完了
簡単な Thread ネットワークを作成し、このネットワーク内の通信を確認しました。
これで、次のことがわかりました。
- Telink Zephyr 開発環境を構築して使用する方法。
ot-cli-ftdバイナリとot-rcpバイナリをビルドし、Telink B91 開発ボードに書き込む方法。- Docker を使用して Raspberry Pi 3B+ 以降のバージョンを OpenThread Border Router(OTBR)として設定する方法。
- OTBR で Thread ネットワークを作成する方法。
- アウトオブバンド コミッショニングを使用して Thread ネットワークにデバイスを追加する方法。
- Thread ネットワーク内のノード間の接続を確認する方法。
関連情報
openthread.io と GitHub で、以下を含むさまざまな OpenThread リソースをご確認ください。
- 対応プラットフォーム - OpenThread をサポートするすべてのプラットフォームを確認する
- OpenThread をビルドする - OpenThread のビルドと構成に関する詳細
- Thread の入門 - この Codelab で取り上げる Thread のコンセプトをすべて説明しています
参考ドキュメント: