
1. 소개

Google의 OpenThread (OT)는 Thread의 오픈소스 구현입니다. Google은 커넥티드 홈 및 상업용 건물을 위한 제품 개발을 가속화하기 위해 Google Nest 제품에 사용되는 네트워킹 기술을 개발자에게 더 광범위하게 제공하고자 OpenThread를 출시했습니다. 좁은 플랫폼 추상화 레이어와 작은 메모리 공간을 갖춘 OpenThread는 이식성이 매우 높습니다. 단일 칩 시스템 (SoC) 및 네트워크 공동 프로세서 (NCP) 설계를 모두 지원합니다.
스레드 사양은 홈 및 상업용 건물 애플리케이션을 위한 IPv6 기반의 안정적이고 안전하며 저전력 무선 기기 간 통신 프로토콜을 정의합니다.
Silicon Labs는 Silicon Labs 하드웨어와 호환되도록 OpenThread를 개선했습니다. 이 소스 코드는 GitHub에서 제공되며 Simplicity Studio 5 (SSv5)와 함께 설치되는 소프트웨어 개발 키트 (SDK)로도 제공됩니다. SDK에는 완전히 테스트된 GitHub 소스 코드 스냅샷이 포함되어 있습니다. GitHub 버전보다 광범위한 하드웨어를 지원하며 GitHub에서는 제공되지 않는 문서와 예시 애플리케이션이 포함되어 있습니다.
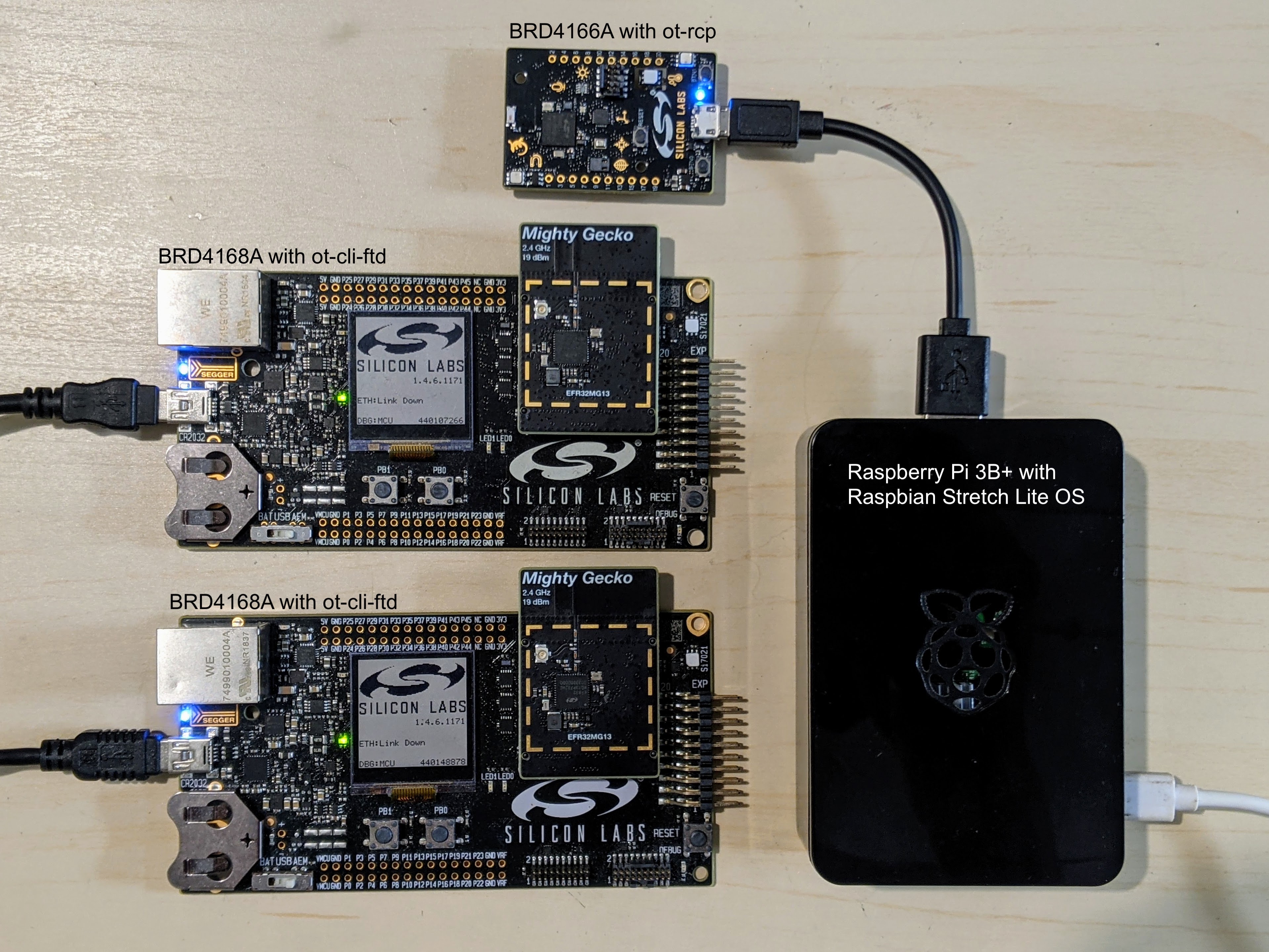
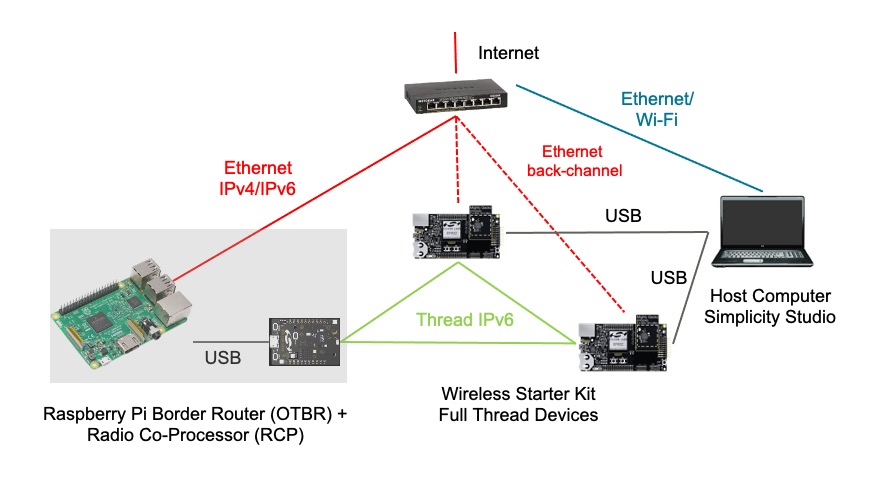
이 가이드에서는 Silicon Labs OpenThread SDK 및 Simplicity Studio 5를 사용하여 OpenThread 애플리케이션 개발을 시작하는 방법을 설명합니다. 아래 이미지는 코드랩에서 사용되는 OT 테두리 라우터 (OTBR)와 두 개의 스레드 기기로 설정된 보드 (BRD)와 하드웨어를 보여줍니다.
학습할 내용
- Silicon Labs Simplicity Studio IDE를 사용하여 OpenThread 프로젝트를 만드는 방법
- Silicon Labs 라디오 보드에 OpenThread CLI 바이너리를 빌드하고 플래시하는 방법
- Docker를 사용하여 Raspberry Pi 3B 이상을 OpenThread Border Router (OTBR)로 설정하는 방법
- OTBR에서 스레드 네트워크를 만드는 방법
- 스레드 네트워크에 기기를 대역 외로 커미셔닝합니다.
- ping 명령어를 사용하여 노드 간 스레드 통신을 확인하는 방법
2. 기본 요건
하드웨어:
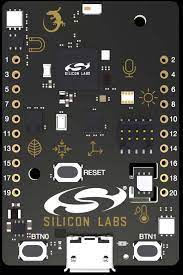
- EFR32MGxx 무선 보드 3개 - 이러한 기기를 원하는 대로 조합하여 사용할 수 있습니다. 이 Codelab에서는 BRD4166A를 RCP로 사용하고 BRD4168A 두 개를 전체 스레드 기기로 사용합니다.
- EFR32MG12 (BRD4161A, BRD4166A, BRD4170A, BRD4304A)
- EFR32MG13 (BRD4168A)
- EFR32MG21 (BRD4180A, BRD4180B)
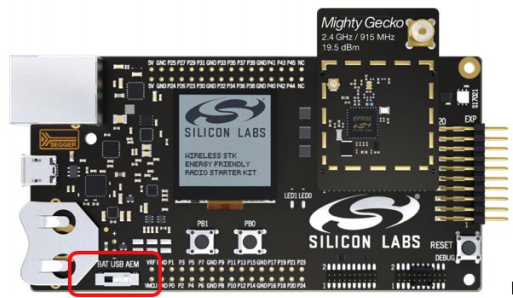
- BRD4001A: 무선 스타터 메인보드 (WSTK)로 라디오 보드를 호스팅합니다. BRD4166A를 제외한 모든 무선 보드에는 각각 스타터 메인 보드가 필요합니다. 메인 보드를 연결하고 전원을 공급하는 미니 USB 케이블 또는 BRD4166A용 마이크로 USB 케이블
- 이더넷을 통해 인터넷에 연결된 Raspbian Stretch Lite OS 이미지 또는 Raspbian Stretch with Desktop이 설치된 Raspberry Pi 3B 이상 이를 OT 보더 라우터로 구성합니다.
- USB 포트가 2개 이상 있고 인터넷에 연결된 Windows/Linux/Mac 호스트 시스템 SSv5에서 하드웨어 및 OS 요구사항을 확인하세요.
- Raspberry Pi를 인터넷에 연결하기 위한 이더넷 케이블 1개 이상 WSTK는 IP를 통한 디버그 및 플래싱도 지원하므로 필요에 따라 추가 이더넷 케이블을 사용하여 이더넷 스위치를 통해 WSTK를 호스트 시스템에 연결할 수 있습니다.
소프트웨어:
- Simplicity Studio v5가 Windows/Linux/Mac 호스트 시스템에 설치되고 업데이트되었습니다.
- GNU ARM 도구 모음
- Gecko SDK Suite 3.2.0 이상 및 Silicon Labs OpenThread SDK
3. 하드웨어 설정
이 Codelab은 다음을 사용하여 만들어졌습니다.
- 왼쪽에 표시된 EFR32MG12 BRD4166A Thunderboard Sense 2
- 오른쪽에 표시된 대로 EFR32MG13 BRD4168A 2개
- macOS Catalina 10.15.7에 설치된 Simplicity Studio v5(
- Gecko SDK 3.2.0
- GNU ARM v7.2.1
아래 이미지와 같이 각 무선 스타터 키트 메인보드를 USB로 호스트 컴퓨터에 연결합니다. 이러한 연결을 통해 RCP와 최종 기기의 프로그래밍 및 네트워크 분석이 허용됩니다. 먼저 호스트 컴퓨터를 사용하여 ot-rcp 펌웨어로 BRD4166A를 프로그래밍하고 최종적으로 Raspberry Pi에 연결합니다. 선택적으로 엔드 기기를 공통 이더넷 스위치를 통해 호스트 컴퓨터에 연결할 수 있습니다. 스타터 키트는 IPv4를 통한 프로그래밍 및 네트워크 분석도 지원합니다.
4. 펌웨어 설정
시작하는 방법에는 두 가지가 있습니다. 두 옵션 모두 이 Codelab에 필요한 펌웨어를 플래시할 수 있습니다.
- 프로젝트: 샘플 애플리케이션을 만들고 빌드하고 플래시합니다(권장). 이 옵션을 사용하면 프로젝트에서 애플리케이션을 맞춤설정할 수 있습니다.OR
- 데모: (선택사항) 샘플 애플리케이션의 라디오 보드에 미리 빌드된 데모를 직접 플래시합니다. 사용자는 선택사항으로 데모 펌웨어를 설정해 보는 것이 좋습니다. 자세한 내용은 이 Codelab의 마지막에 있는 '선택적 펌웨어 설정 - 데모' 섹션을 참고하세요.
이 Codelab에서는 프로젝트 기반 방법을 사용합니다.
예시를 사용하여 프로젝트 만들기
프로젝트 두 개를 만듭니다. BRD4166A의 ot-rcp 프로젝트와 두 BRD4168A의 ot-cli-ftd 프로젝트 다음 단계에 따라 보드에 적합한 샘플 애플리케이션을 선택하세요.
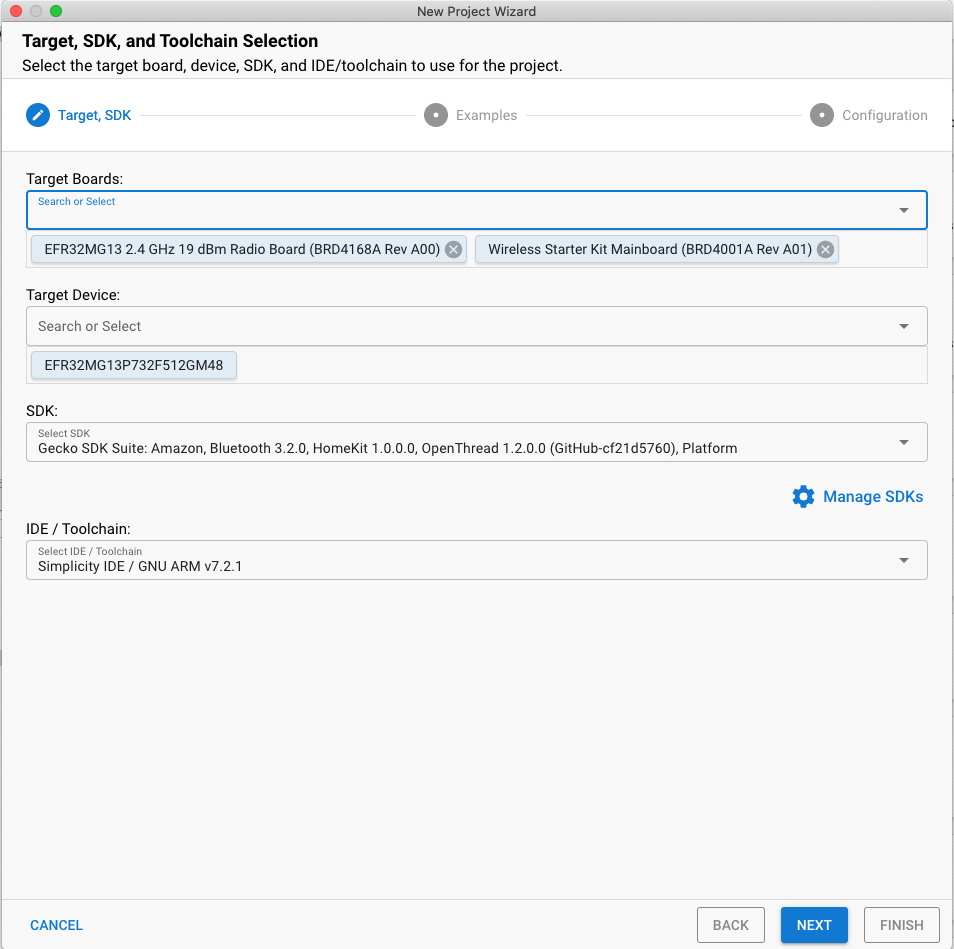
- 스튜디오의 File 메뉴를 열고 New > Silicon Labs Project Wizard를 선택합니다. 타겟, SDK, 도구 모음 선택 대화상자가 열립니다. OpenThread에서 지원하는 기본 Simplicity IDE / GNU 도구 모음을 변경하지 마세요. 다음을 클릭합니다.
- 타겟 보드: 선택한 라디오 보드 (BRD4168A)와 메인 보드 (BRD4001A)를 표시합니다.
- 타겟 기기: 이 필드에는 온보드 마이크로컨트롤러 칩 (MCU)이 표시됩니다. BRD4168A에는 EFR32MG13 MCU가 온보드로 탑재되어 있습니다.
- SDK: 여기에서 작업 중인 OT의 SDK 버전을 선택할 수 있습니다. 스위트 정보에는 SDK 태그와 Silicon Labs의 OpenThread 빌드가 포함됩니다(예:
Platform 4.0.1.0및OpenThread 2.0.1.0 (GitHub-55af6ce2c)). - IDE/ 도구 모음: OT 프로젝트를 컴파일하는 데 사용되는 도구 모음입니다. GNU ARM을 사용합니다.
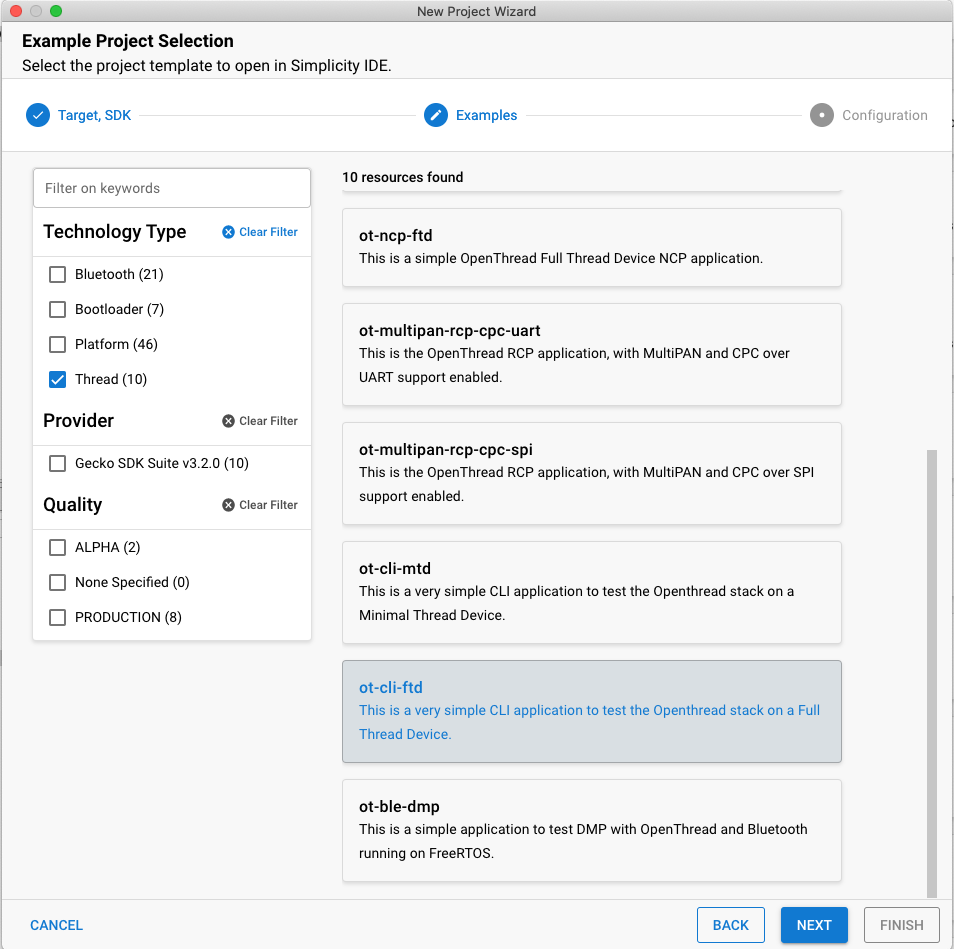
- 예제 프로젝트 선택 대화상자가 열립니다. 예시 프로젝트 목록이 표시됩니다. 스레드 기술 유형 및 키워드 필터를 사용하여 특정 예시를 검색합니다. Gecko SDK Suite 버전 번호를 기록해 둡니다. Raspberry Pi를 보더 라우터로 설정할 때 이 버전 태그가 필요합니다. ot-cli-ftd를 선택하고 다음을 클릭합니다.
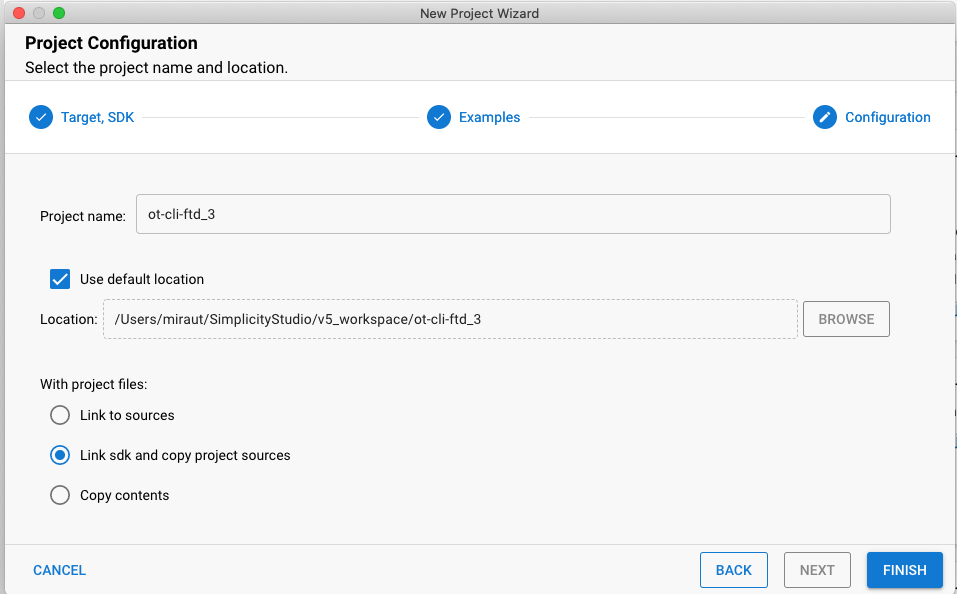
- 프로젝트 구성 대화상자가 열립니다. 여기에서 프로젝트 이름을 바꾸고, 기본 프로젝트 파일 위치를 변경하고, 프로젝트 파일을 연결할지 복사할지 결정할 수 있습니다. 연결된 프로젝트 파일은 SDK를 가리키며, 변경사항은 SDK에서 이루어져 향후 프로젝트에 사용됩니다. 프로젝트 소스를 복사하면 SDK 파일이 그대로 유지되도록 프로젝트 로컬 복사본을 수정할 수 있습니다. 'SDK 연결 및 프로젝트 소스 복사'가 기본값이며 권장되는 옵션입니다. 완료를 클릭합니다.
- Simplicity IDE 관점이 열리고 프로젝트 구성기가 개요 탭에 열립니다.
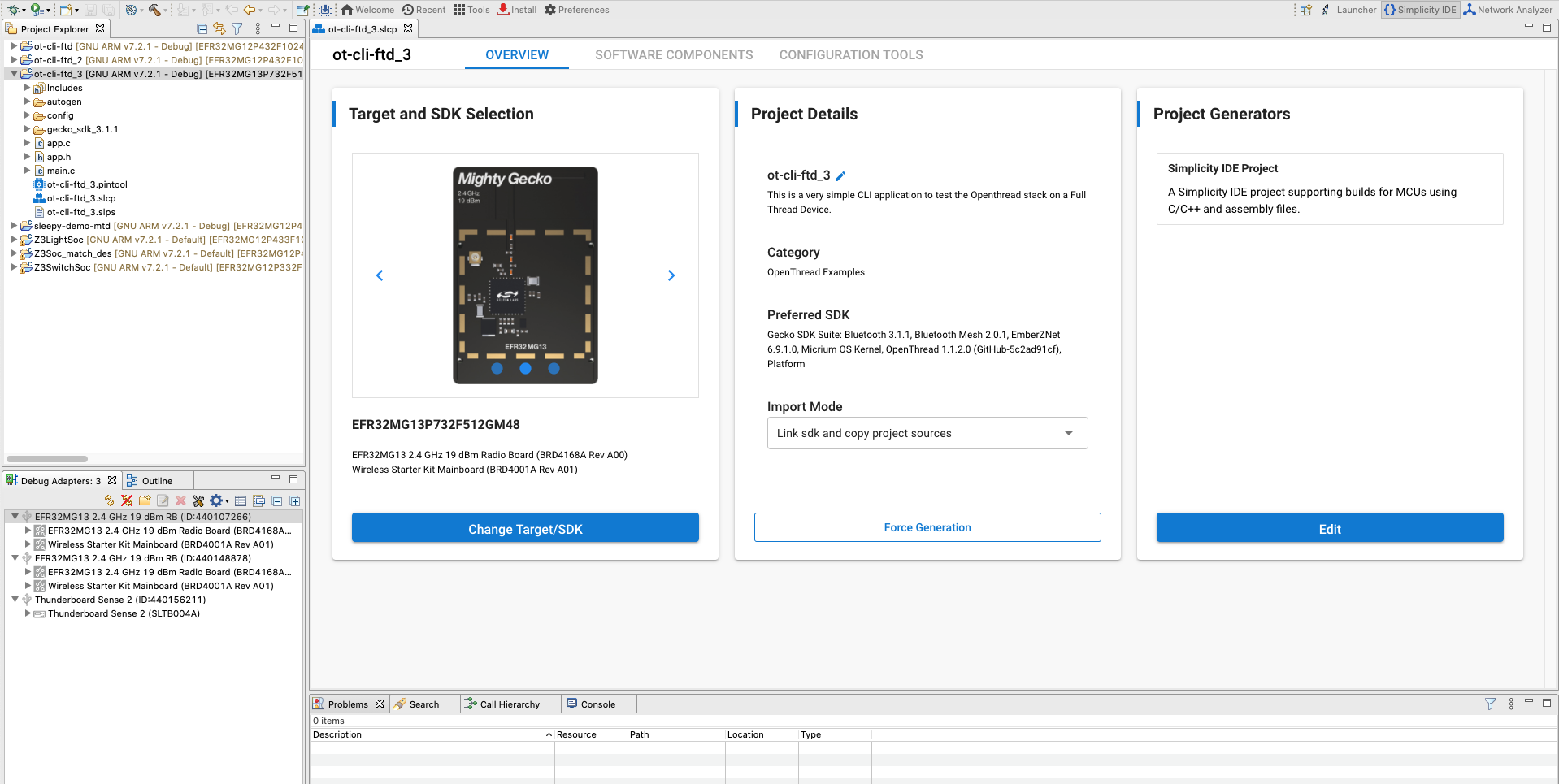
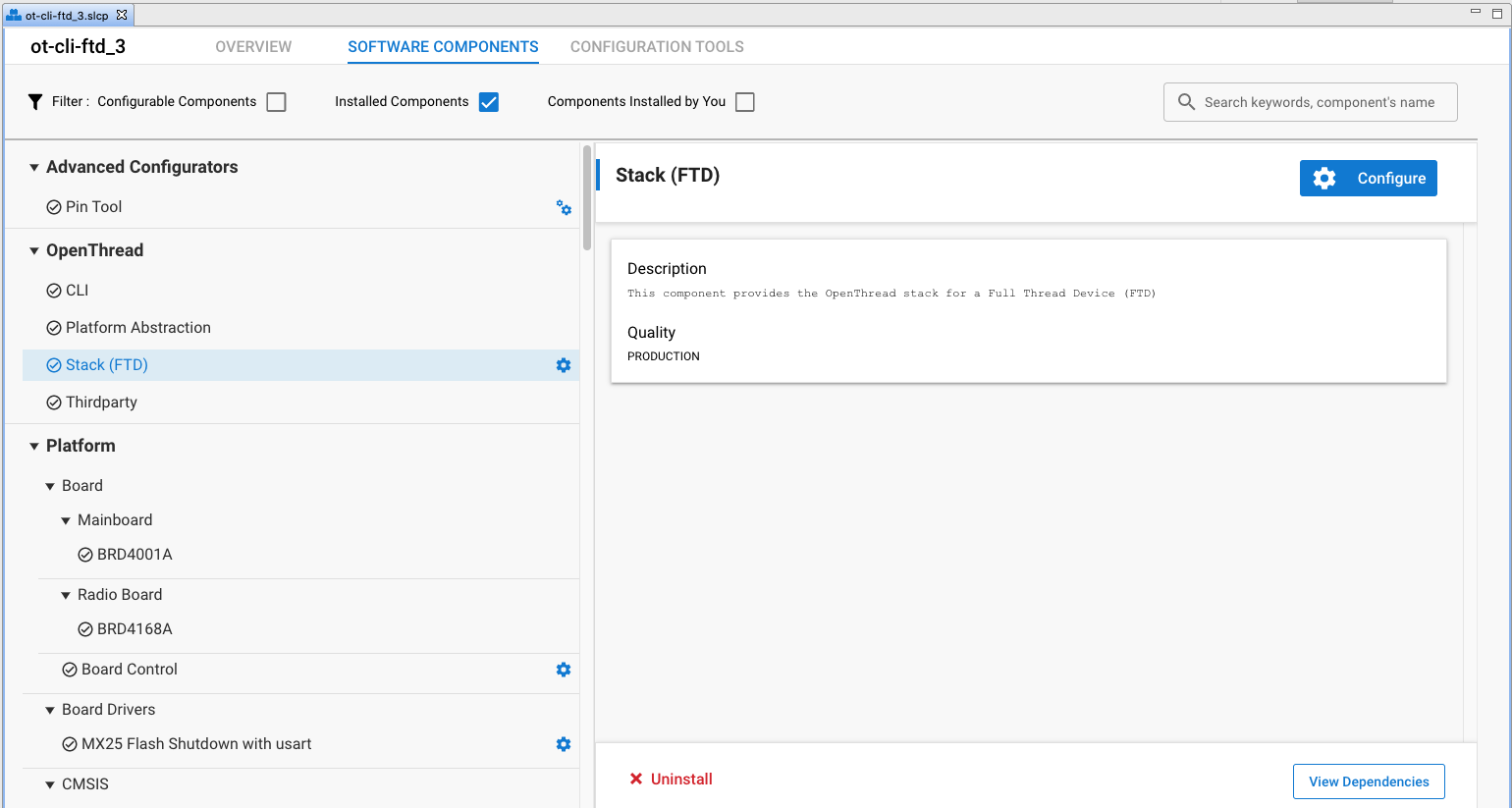
구성요소를 설치 및 제거하고 설치된 구성요소를 구성하여 소프트웨어 구성요소 탭에서 프로젝트를 구성합니다. 설치된 구성요소가 확인됩니다. 설치된 구성요소를 클릭하여 예시 애플리케이션에서 설치한 구성요소의 필터링된 목록을 확인합니다. 변경사항은 자동 저장되고 프로젝트 파일은 자동 생성됩니다. 진행 상황은 Simplicity IDE 관점의 오른쪽 하단에 표시됩니다.
이 데모에서는 샘플 애플리케이션의 기본 구성을 사용합니다. 위 단계를 반복하여 다른 보드의 ot-rcp 프로젝트를 만듭니다.
프로젝트 빌드 및 플래시
ot-rcp 및 ot-cli-ftd 프로젝트를 모두 빌드하고 플래시합니다.
- 프로젝트가 구성되면 상단 도구 모음에서 빌드 컨트롤 (망치 아이콘)을 클릭합니다. 또는 프로젝트를 마우스 오른쪽 버튼으로 클릭하고 프로젝트 빌드를 클릭합니다.

- 진행 상황은 콘솔에 표시되고 오른쪽 하단에 진행률 표시줄이 표시됩니다. 프로젝트와 관련된 오류나 경고도 이 출력 창에 표시됩니다.
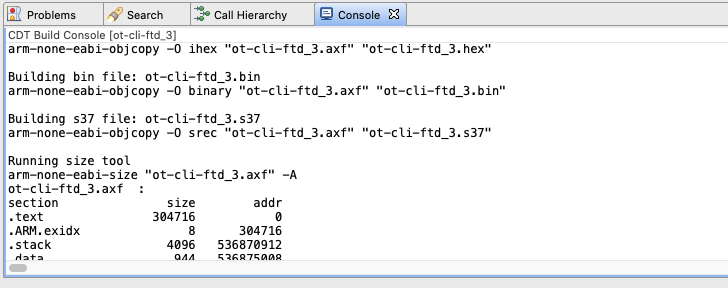
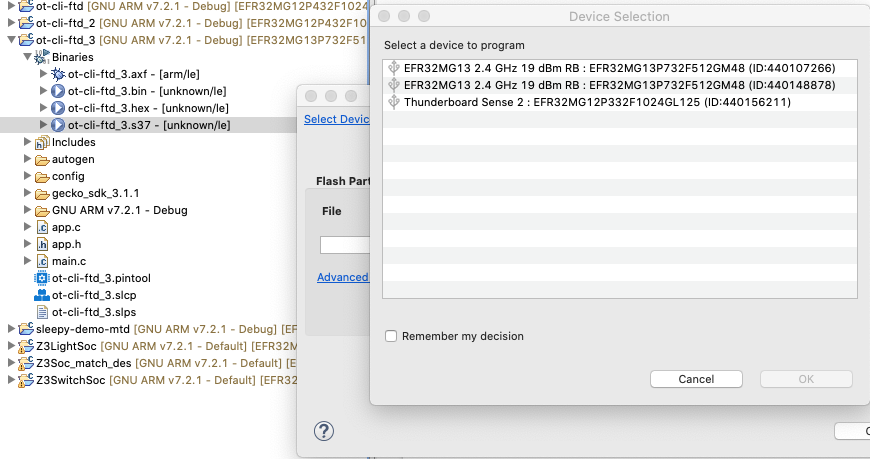
- 바이너리 이미지는 프로젝트 빌드가 성공한 후에 생성됩니다. 프로젝트 탐색기 보기에서 바이너리 이미지를 플래시할 수 있습니다. 컴파일러 하위 디렉터리에서 .bin, .hex 또는 .s37 파일을 찾습니다. 파일을 마우스 오른쪽 버튼으로 클릭하고 기기에 플래시를 선택합니다. 연결된 기기가 두 대 이상인 경우 프로그래밍할 기기를 선택하고 확인을 클릭합니다. 파일 경로가 채워진 상태로 Flash Programmer가 열립니다. 프로그램을 클릭합니다.
5. 펌웨어 설정 요약
이 시점에서 무선 보드에 적절한 펌웨어를 만들고 컴파일하고 플래시해야 합니다. ot-rcp가 BRD4166A에 플래시되면 호스트 시스템에서 연결을 해제하고 이 보드를 Raspberry Pi에 연결합니다.
이 섹션을 완료하면 스레드 네트워크 하드웨어 설정이 다음과 같이 표시됩니다.
6. ot-cli-ftd 기기의 직렬 콘솔 설정
콘솔 인터페이스를 실행하려면 Simplicity IDE 관점에서 기기 뷰 / 디버그 어댑터 창에서 J-Link 기기를 마우스 오른쪽 버튼으로 클릭합니다. 콘솔 실행을 선택합니다. 콘솔에서 프롬프트를 표시하려면 Serial 1 탭을 선택하고 Enter 키를 누릅니다. FTD 노드의 상태를 확인합니다.
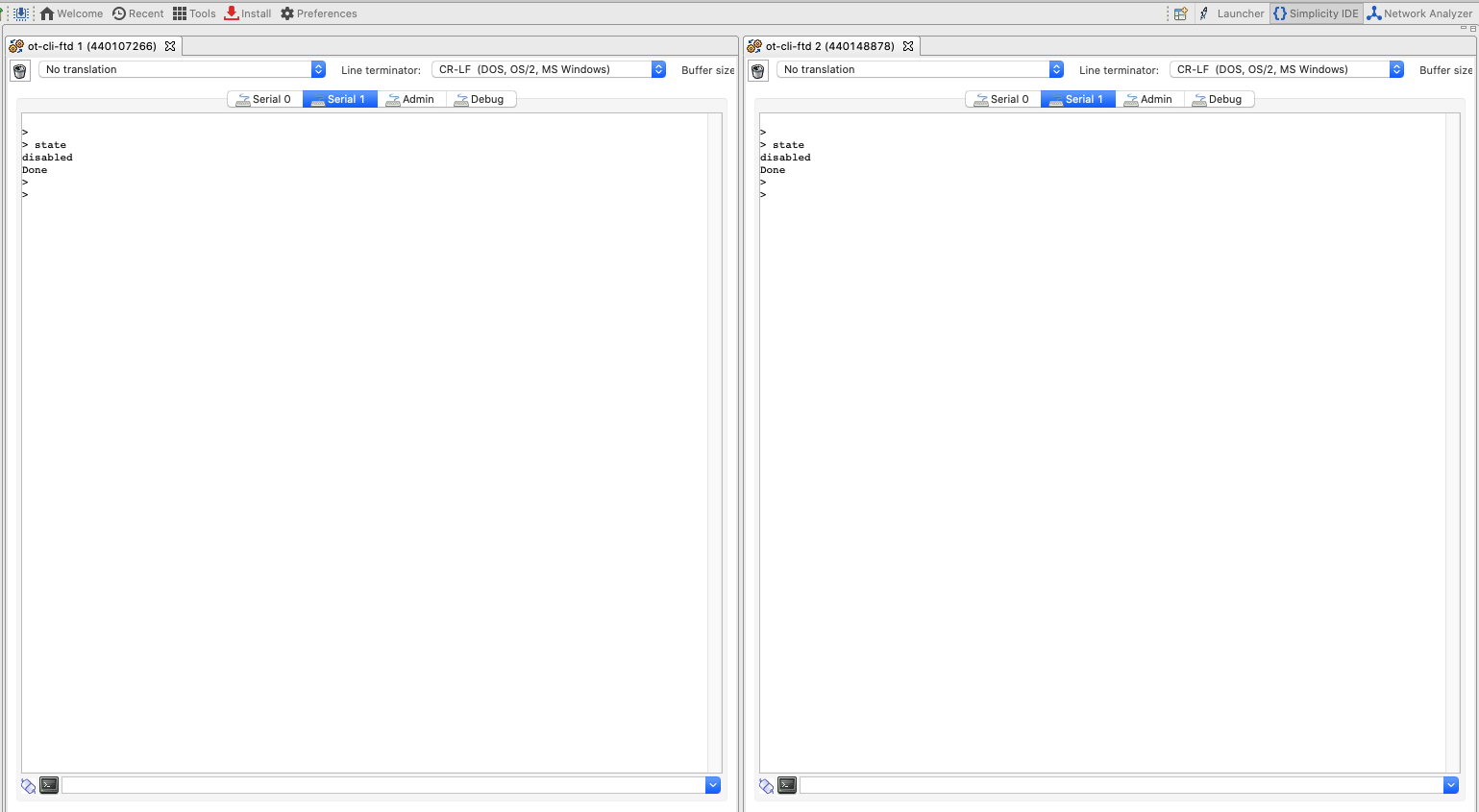
ot-rcp용 콘솔은 아직 없습니다. 다음 단계에서는 라즈베리 파이를 OT 보더 라우터로 구성하고 ot-rcp용 콘솔을 설정합니다.
7. Raspberry Pi를 Border Router로 설정
Silicon Labs는 OTBR을 사용하여 회사의 Docker 컨테이너를 배포할 것을 권장합니다. 컨테이너에서 OTBR을 실행하면 쉽게 배포할 수 있는 아티팩트를 만들고 신속한 개발 프로토타입 제작 및 테스트가 가능합니다.
Silicon Labs OTBR 이미지는 태그와 함께 siliconlabsinc DockerHub에서 호스팅됩니다. 각 태그는 GSDK 버전에 해당합니다.
https://hub.docker.com/r/siliconlabsinc/openthread-border-router/tags
Docker 컨테이너는 특정 출시를 위해 Simplicity Studio 5를 사용하여 빌드된 RCP와 함께 사용해야 합니다. 컨테이너 태그 버전을 테스트에 사용하는 GSDK 버전과 일치시켜야 합니다. 예를 들어 예시 프로젝트 선택 창에서 ot-rcp을 선택했을 때 GDSK 버전이 Gecko SDK Suite v4.0.1 (140)인 경우 siliconlabsinc/openthread-border-router:gsdk-4.0.1 이미지를 사용합니다.
Raspberry Pi 설정
- SD 카드에 Raspbian Stretch Lite OS 이미지 또는 Raspbian Stretch with Desktop을 플래시해야 합니다.
- Raspberry Pi에 SSH로 연결하거나 Raspbian 데스크톱을 직접 사용할 수 있습니다. 터미널을 엽니다.
- Docker를 설치하기 전에 로컬 저장소와 패키지 관리자 (apt-get update 및 apt-get upgrade)를 업데이트해야 합니다.
Docker 이미지 설치
- RPi에서 다음 명령어를 사용하여 Docker를 설치합니다.
curl -sSL https://get.docker.com | sh
- 완료되면 각 명령어 전에 sudo가 필요하지 않도록 Docker 사용자 설정을 수정할 수 있습니다. 재부팅이 필요합니다.
sudo usermod -aG docker $USER
- 다음 명령어를 실행하여 컨테이너를 설치합니다. RCP를 사용하면 한 번에 하나의 테두리 라우터 컨테이너만 실행할 수 있습니다. 또한 Simplicity Studio GSDK 버전을 올바른 Docker 이미지와 일치시켜야 합니다. 예를 들어
gsdk-4.0.1는 다음과 같습니다.docker pull siliconlabsinc/openthread-border-router:gsdk-4.0.1
Docker 구성 및 실행
- OTBR이 시작 시 RCP를 연결하는 데 사용할 TTY 포트를 구성해야 합니다. RCP 기기의 TTY 포트를 찾습니다. 가장 쉬운 방법은 RCP가 연결된 후
/tty/dev... 항목을 찾는 것입니다. 일반적으로/dev/ttyUSB0또는/dev/ttyACM0이어야 합니다. - 다음 명령어를 사용하여 Docker 설치를 실행합니다. Docker 이미지 이름을 일치하는 GSDK 버전으로 바꿔야 합니다. 예를 들어
gsdk-4.0.1는 다음과 같습니다.docker run -d --name "otbr" \ --sysctl "net.ipv6.conf.all.disable_ipv6=0 net.ipv4.conf.all.forwarding=1 net.ipv6.conf.all.forwarding=1" \ -p 8080:80 --dns=127.0.0.1 -it \ --volume /dev/ttyACM0:/dev/ttyACM0 \ --privileged siliconlabsinc/openthread-border-router:gsdk-4.0.1 \ --radio-url spinel+hdlc+uart:///dev/ttyACM0?uart-baudrate=460800 \ --backbone-interface eth0
-d는 컨테이너가 분리된 모드로 실행되도록 합니다.docker logs명령어를 사용하여 언제든지 컨테이너의 실행 로그를 확인할 수 있습니다.--name는 Docker 컨테이너가 제대로 닫히거나 삭제될 때까지 고정됩니다.- 포트 8080은 Border Router 관리 웹페이지를 호스팅하는 웹 서버의 포트를 나타냅니다.
?uart-baudrate=460800은 긴 IPv6 패킷이 있는 DTLS와 같은 비용이 많이 드는 작업으로 UART를 통한 조각화 / 재조립 문제를 해결하기 위해 라디오 URL 옵션에 필요합니다.
RCP 노드와 상호작용
Docker가 실행되면 이 명령어를 사용하여 대화형 셸을 통해 RCP 노드와 통신할 수 있습니다. RCP 노드의 상태를 확인합니다.
$ docker exec -ti otbr sh -c "sudo ot-ctl" > state disabled Done
실행 중인 컨테이너 ID 목록을 가져올 수 있습니다.
$ docker ps -aq
OTBR Docker 컨테이너를 실행하는 창에서 Border Router의 실행 로그 출력을 확인하거나 다음과 같이 컨테이너 로그를 따를 수 있습니다.
$ docker logs [container-id] -f
선택적으로 Docker 컨테이너가 올바르게 로드된 경우 이미지를 중지하거나 삭제하거나 종료할 수 있습니다.
$ docker stop otbr
$ docker rm otbr
$ docker kill otbr
선택사항: 셸을 종료하려면 CNTL + C를 사용합니다.
이제 콘솔이 3개 있어야 합니다.
- Simplicity Studio에 있는 두 개의
ot-cli-ftd콘솔이 전체 스레드 기기로 설정되어 있습니다. - OT 테두리 라우터로 설정된 Raspberry Pi의
ot-ctl대화형 셸 하나
이제 스레드 네트워크를 형성할 준비가 되었습니다.
8. 스레드 네트워크 만들기
RCP 설정
네트워크를 만들려면 RCP 노드와 통신하는 데 사용되는 OTBR에서 ot-ctl 셸로 시작합니다. 아래와 같이 순서대로 다음 명령어를 입력합니다.
색인 | 명령어 | 명령어 설명 | 예상 대답 | ||
1 |
| 새 네트워크 구성을 만듭니다. | 완료 | ||
2 |
| 새 데이터 세트를 활성 운영 데이터 세트에 커밋합니다. | 완료 | ||
3 |
| 스레드 인터페이스를 사용 설정합니다. | 완료 | ||
4 |
| 스레드 프로토콜 작업을 사용 설정하고 연결합니다. | 완료 | ||
스레드 인터페이스가 작동될 때까지 10초 동안 기다립니다. | |||||
5 |
| 기기 상태를 확인합니다. 리더여야 합니다. | 리더 | ||
6 |
| 네트워크 구성을 확인합니다. | 활성 타임스탬프: 1 | ||
ot-cli-ftd의 채널 번호와 네트워크 키를 사용하여 두 FTD를 이 스레드 네트워크에 가입시킵니다.
스레드 네트워크에 FTD 설정 및 추가 (대역 외 방법)
대역 외 방법을 사용하면 모든 보안 정보를 알고 노드를 수동으로 추가합니다. Simplicity 콘솔에서 아래에 표시된 순서대로 다음 명령어를 사용하여 FTD를 네트워크에 추가합니다.
색인 | 명령어 | 명령어 설명 | 예상 대답 | ||
1 |
| OTBR에서 사용하는 채널을 설정합니다. | 완료 | ||
2 |
| 기기가 스레드 네트워크에 연결하려면 네트워크 키만 있으면 됩니다. | 완료 | ||
3 |
| 새 데이터 세트를 활성 운영 데이터 세트에 커밋합니다. | 완료 | ||
4 |
| 스레드 인터페이스를 사용 설정합니다. | 완료 | ||
5 |
| 스레드 프로토콜 작업을 사용 설정하고 연결합니다. | 완료 | ||
기기가 참여하고 자체적으로 구성될 때까지 20초 동안 기다립니다. | |||||
6 |
| 네트워크 구성을 봅니다. | child | ||
스레드 기기 간 통신
ping 명령어를 사용하여 기기가 서로 통신할 수 있는지 확인합니다. ping 명령어를 사용하려면 기기의 IPv6 주소가 필요합니다. 이러한 값은 ipaddr 명령어를 사용하여 가져올 수 있습니다.
> ipaddr fd5c:c6b:3a17:40b9:0:ff:fe00:fc00 # Leader Anycast Locator (ALOC) fd5c:c6b:3a17:40b9:0:ff:fe00:1800 # Routing Locator (RLOC) fd5c:c6b:3a17:40b9:84e2:bae8:bd5b:fa03 # Mesh-Local EID (ML-EID) fe80:0:0:0:c449:ca4a:101f:5d16 # Link-Local Address (LLA)
두 FTD에서 OTBR의 RLOC 주소를 사용하여 OTBR을 핑합니다.
> ping fd5c:c6b:3a17:40b9:0:ff:fe00:1800 Done > > 16 bytes from fd5c:c6b:3a17:40b9:0:ff:fe00:1800: icmp_seq=3 hlim=64 time=30ms 16 bytes from fd5c:c6b:3a17:40b9:0:ff:fe00:1800: icmp_seq=3 hlim=64 time=52ms
응답은 수신된 페이로드를 나타내며 통신이 성공했음을 나타냅니다. OTBR에서 FTD를 핑하는 프로세스를 반복합니다.
9. 축하합니다
스레드 네트워크가 생성되었습니다.
이제 다음 사항을 알게 되었습니다.
- Silicon Labs Simplicity Studio IDE를 사용하여 OpenThread 프로젝트를 만드는 방법
- Silicon Labs 라디오 보드에 OpenThread CLI 바이너리를 빌드하고 플래시하는 방법
- Docker를 사용하여 Raspberry Pi 3B 이상을 OpenThread Border Router (OTBR)로 설정하는 방법
- OTBR에서 스레드 네트워크를 만드는 방법
- 스레드 네트워크에 기기를 대역 외로 커미셔닝합니다.
- ping 명령어를 사용하여 노드 간 스레드 통신을 확인하는 방법
추가 자료
openthread.io 및 GitHub에서 다음을 비롯한 다양한 OpenThread 리소스를 확인하세요.
- 지원되는 플랫폼: OpenThread를 지원하는 모든 플랫폼을 알아봅니다.
- OpenThread 빌드: OpenThread 빌드 및 구성에 관한 자세한 내용
- 스레드 기본사항: 이 Codelab에 나온 모든 스레드 개념을 다룹니다.
- Silicon Labs OpenThread 교육: OpenThread 소개, 커미셔닝 및 보더 라우터 논의, OpenThread 네트워크를 만드는 실습
- QSG170: Silicon Labs OpenThread 빠른 시작 가이드 - Silicon Labs Thread 개발 시작 프로세스를 자세히 설명합니다.
- AN1256: OpenThread 보더 라우터와 함께 Silicon Labs RCP 사용 - Raspberry Pi 보더 라우터 호스트 빌드 및 설치 안내
10. 선택적 펌웨어 설정 - 데모
데모는 호환 기기에 다운로드할 수 있는 사전 빌드된 펌웨어 이미지입니다. Simplicity Studio에서 부품의 데모를 사용할 수 있는지 가장 빠르게 확인하는 방법은 디버그 어댑터 뷰에서 부품을 클릭한 다음 런처 관점에서 예제 프로젝트 및 데모 탭으로 이동하는 것입니다. 예제 프로젝트 필터를 사용 중지하고 기술 유형에서 스레드 라디오 체크박스를 선택합니다.
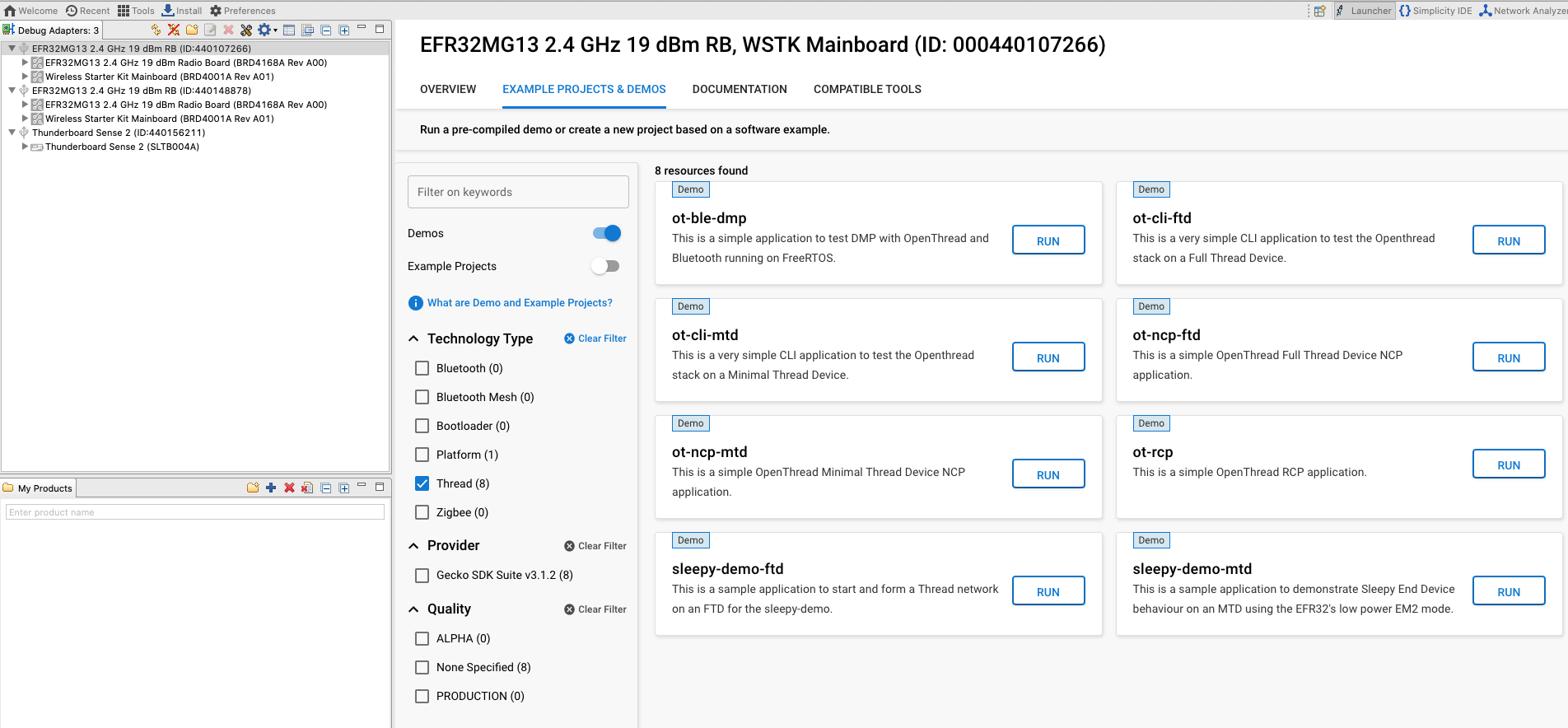
OpenThread SDK와 함께 제공되는 사전 컴파일된 데모 애플리케이션 이미지는 다음 보드와 호환됩니다.
- BRD4161a
- BRD4166a
- BRD4168a
- BRD4180a
- BRD4304a
이 목록은 향후 SDK 출시에서 더 많은 라디오 보드를 포함하도록 업데이트될 수 있습니다. 지원되는 부품의 전체 목록은 문서의 Silicon Labs OpenThread SDK 출시 노트를 참고하세요.
각 보드에 다음 데모를 플래시합니다. 플래시하려면 왼쪽의 디버그 어댑터에서 보드를 선택하고 해당 샘플 애플리케이션의 실행을 클릭합니다. 플래시 진행 상황이 팝업 창에 표시됩니다.
- BRD4166A: ot-rcp - 이 기기는 OT 보더 라우터의 무선 공동 프로세서로 작동합니다. 이 기기를 사용하여 스레드 네트워크를 만들고 스레드 네트워크에 다른 두 기기를 온보딩합니다. 보더 라우터인 이 기기는 스레드 네트워크의 기기가 인터넷을 통해 통신할 수 있는 게이트웨이 역할도 합니다.
- BRD4168A 2개: ot-cli-ftd - 이 두 기기는 전체 스레드 기기로 작동합니다. OTBR에서 만든 스레드 네트워크에 연결됩니다.