
לפני שממשיכים, מומלץ לעבור על הסדנה המקוונת בנושא חומרה של OpenThread, שבה מוסבר איך להגדיר את הסביבה ולהתקין את כל הכלים והתוכנות שנדרשים להפעלת לוח nRF52840 DK שמשמש במדריך הזה.
איך יוצרים OpenThread
- משכפלים את מאגר OpenThread ועוברים אל Thread Reference
2018-09-26
commit של הגרסה:
git clone https://github.com/openthread/openthreadcd openthreadgit checkout -b thread-reference-20180926 - מתקינים את GNU toolchain ויחסי תלות אחרים:
./script/bootstrap - מבצעים build לדוגמה של nRF52840. המתג
USB=1מאפשר USB CDC ACM מקורי כהעברה טורית.make -f examples/Makefile-nRF52840 BORDER_AGENT=1 BORDER_ROUTER=1 COMMISSIONER=1 \ DHCP6_CLIENT=1 DHCP6_SERVER=1 JOINER=1 MAC_FILTER=1 REFERENCE_DEVICE=1 \ UDP_FORWARD=1 USB=1
הפעלת הפלאש וחיבור ה-NCP
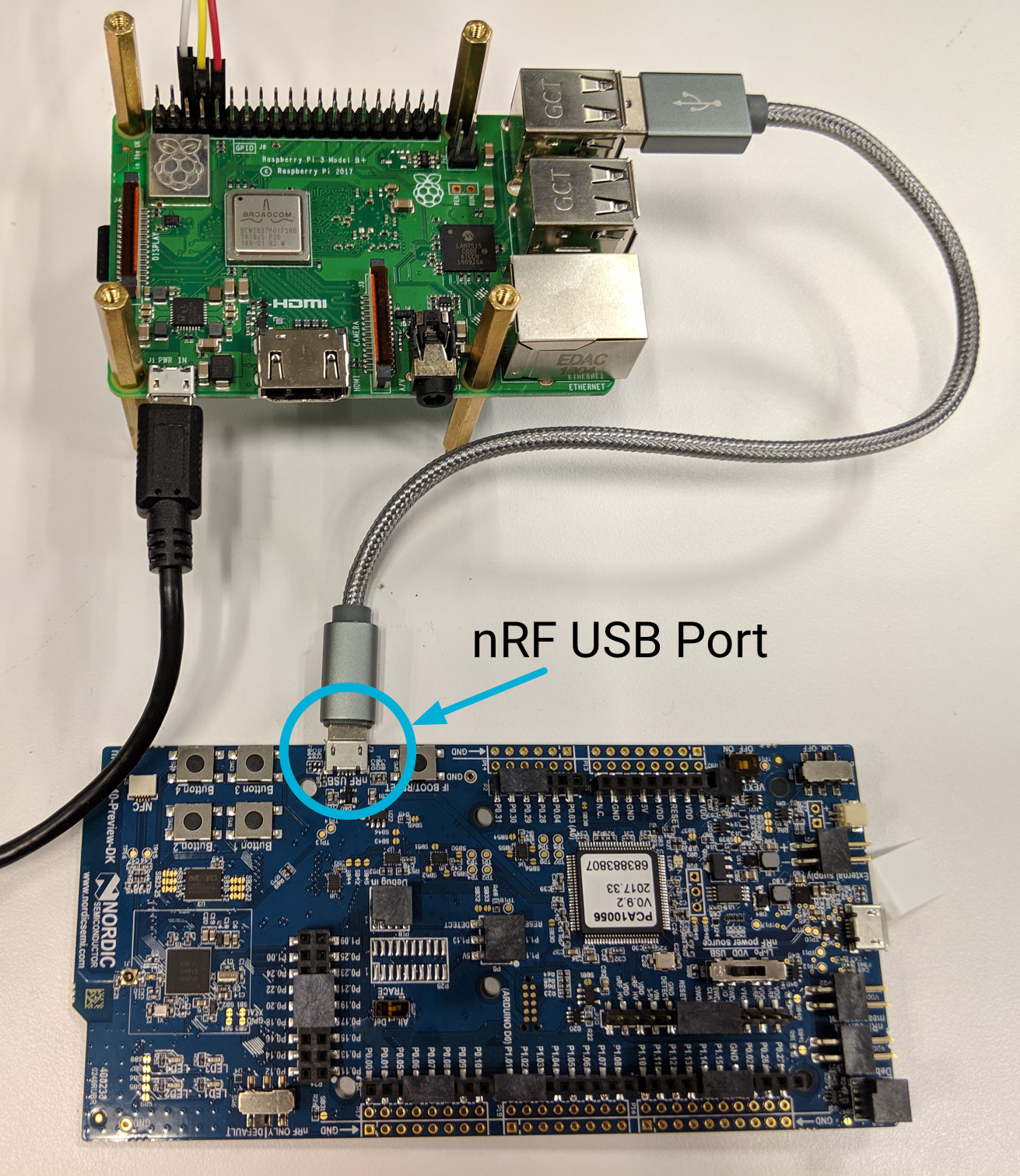
במדריך Pre-Built NCP Firmware מפורטים השלבים Flash the nRF52840 ו-Connect the nRF52840. השלבים האלה מסבירים איך להפעיל את לוח nRF52840 DK כ-NCP ולחבר אותו ל-Raspberry Pi.
הוראות דומות מופיעות גם ב-OpenThread Hardware Codelab.
הגדרת Raspberry Pi
הוראות להתקנת מערכת ההפעלה ולהגדרת המכשיר מופיעות בשלב ההורדה וההתקנה של מערכת ההפעלה בדף הפלטפורמה של נתב הגבול Raspberry Pi 3B (RPi3B).
בנוסף להגדרה הרגילה של RPi3B, צריך להתקין את git וכמה כלי עזר מומלצים:
sudo apt-get install git screen tcpdumpהגדרה של OpenThread Border Router
- משכפלים את מאגר OpenThread Border Router ועוברים אל קומיט הגרסה Thread
Certified 2018-08-19:
git clone https://github.com/openthread/ot-br-posixcd ot-br-posixgit checkout -b thread-br-certified-20180819 - יחסי תלות של התקנות:
./script/bootstrap - מהדרים ומתקינים את OTBR ואת
wpantundבאמצעות קומיט האישור של OTBR עבורwpantund:WPANTUND_COMMIT=8c189c6 ./script/setup - פותחים את
/etc/wpantund.confומעדכנים את יציאת ה-UART עבור nRF52840 DK NCP:Config:NCP:SocketPath '/dev/ttyACM0'
- מפעילים מחדש את שירות
wpantund:sudo service wpantund restart
הנתב של הגבול אמור להיות פעיל עכשיו. מידע נוסף על OTBR זמין במאמר OpenThread Border Router.