
계속하기 전에 OpenThread 하드웨어 Codelab을 살펴보는 것이 좋습니다. 이 Codelab에서는 환경을 설정하고 이 가이드에 사용된 nRF52840 DK 보드를 플래시하는 데 필요한 모든 도구와 소프트웨어를 설치하는 방법을 자세히 설명합니다.
OpenThread 빌드
- OpenThread 저장소를 클론하고 Thread Reference 2018-09-26 출시 커밋으로 전환합니다.
git clone https://github.com/openthread/openthreadcd openthreadgit checkout -b thread-reference-20180926 - GNU 도구 모음 및 기타 종속 항목을 설치합니다.
./script/bootstrap - nRF52840 예시를 빌드합니다.
USB=1스위치는 네이티브 USB CDC ACM을 직렬 전송으로 사용 설정합니다.make -f examples/Makefile-nRF52840 BORDER_AGENT=1 BORDER_ROUTER=1 COMMISSIONER=1 \ DHCP6_CLIENT=1 DHCP6_SERVER=1 JOINER=1 MAC_FILTER=1 REFERENCE_DEVICE=1 \ UDP_FORWARD=1 USB=1
NCP 플래시 및 연결
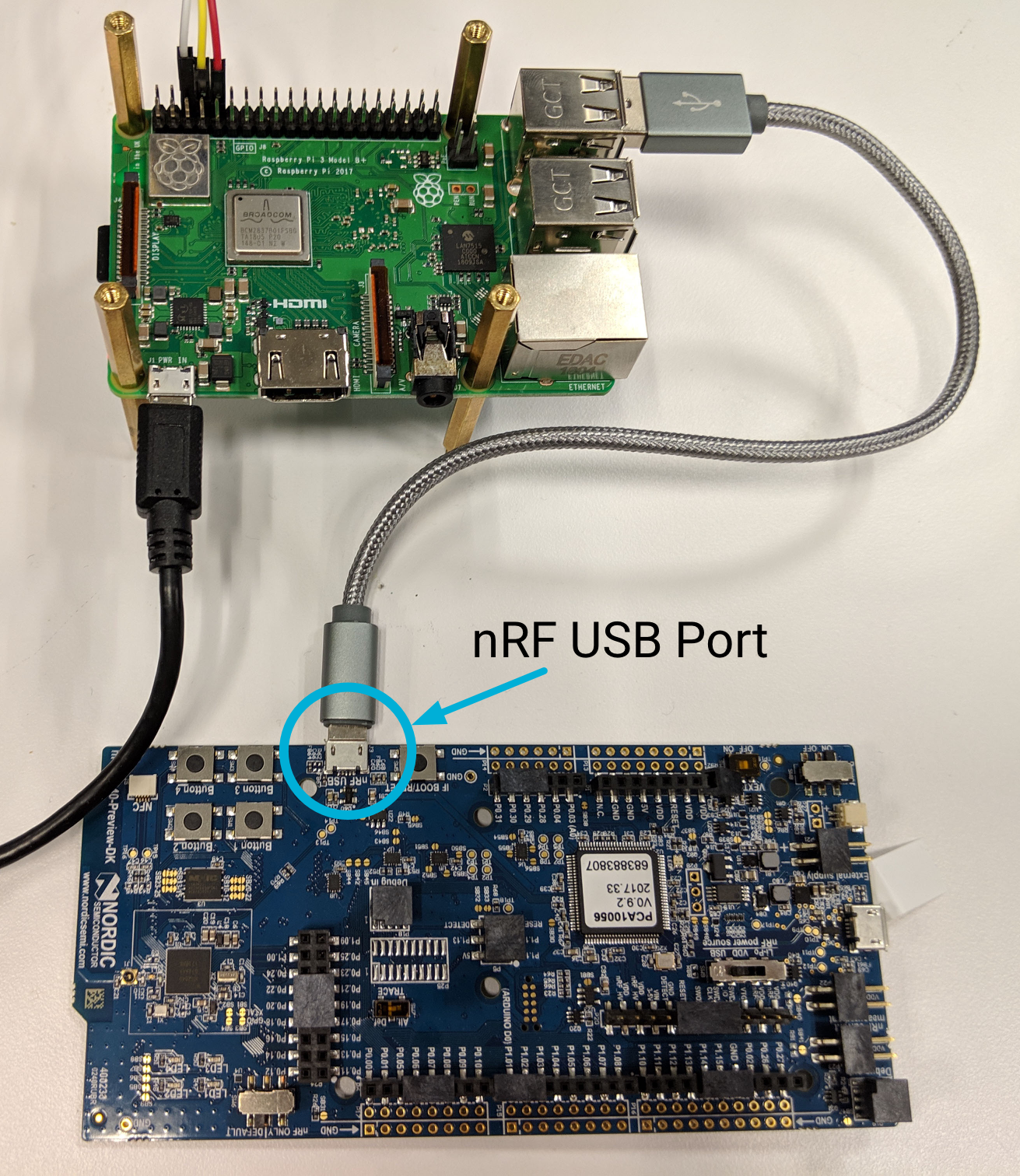
nRF52840 DK 보드를 NCP로 플래시하고 Raspberry Pi에 연결하는 방법은 미리 빌드된 NCP 펌웨어 가이드의 nRF52840 플래시 및 nRF52840 연결 단계를 참고하세요.
OpenThread 하드웨어 Codelab에서도 유사한 안내를 확인할 수 있습니다.
Raspberry Pi 설정
OS를 설치하고 기기를 구성하는 방법은 Raspberry Pi 3B (RPi3B) 테두리 라우터 플랫폼 페이지의 OS 다운로드 및 설치 단계를 참고하세요.
일반적인 RPi3B 설정 및 구성 외에도 git 및 권장 유틸리티를 설치합니다.
sudo apt-get install git screen tcpdumpOpenThread 보더 라우터 설정
- OpenThread 보더 라우터 저장소를 클론하고 Thread Certified 2018-08-19 출시 커밋으로 전환합니다.
git clone https://github.com/openthread/ot-br-posixcd ot-br-posixgit checkout -b thread-br-certified-20180819 - 종속 항목을 설치합니다.
./script/bootstrap wpantund의 OTBR 인증 커밋을 사용하여 OTBR과wpantund를 컴파일하고 설치합니다.WPANTUND_COMMIT=8c189c6 ./script/setup/etc/wpantund.conf를 열고 nRF52840 DK NCP의 UART 포트를 업데이트합니다.Config:NCP:SocketPath '/dev/ttyACM0'
wpantund서비스를 다시 시작합니다.sudo service wpantund restart
이제 테두리 라우터가 작동합니다. OTBR에 대한 자세한 내용은 OpenThread Border Router를 참고하세요.