
Devam etmeden önce, bu kılavuzda kullanılan nRF52840 DK kartını flashlamak için gereken tüm araçları ve yazılımları yüklemenin yanı sıra ortamınızı nasıl ayarlayacağınızı ayrıntılı olarak açıklayan OpenThread Hardware Codelab'i incelemenizi öneririz.
OpenThread'i derleme
- OpenThread deposunu klonlayın ve Thread Reference
2018-09-26
sürüm commit'ine geçin:
git clone https://github.com/openthread/openthreadcd openthreadgit checkout -b thread-reference-20180926 - GNU araç zincirini ve diğer bağımlılıkları yükleyin:
./script/bootstrap - nRF52840 örneğini oluşturun.
USB=1anahtarı, yerel USB CDC ACM'yi seri aktarım olarak etkinleştirir.make -f examples/Makefile-nRF52840 BORDER_AGENT=1 BORDER_ROUTER=1 COMMISSIONER=1 \ DHCP6_CLIENT=1 DHCP6_SERVER=1 JOINER=1 MAC_FILTER=1 REFERENCE_DEVICE=1 \ UDP_FORWARD=1 USB=1
NCP'yi flaşlayın ve bağlayın
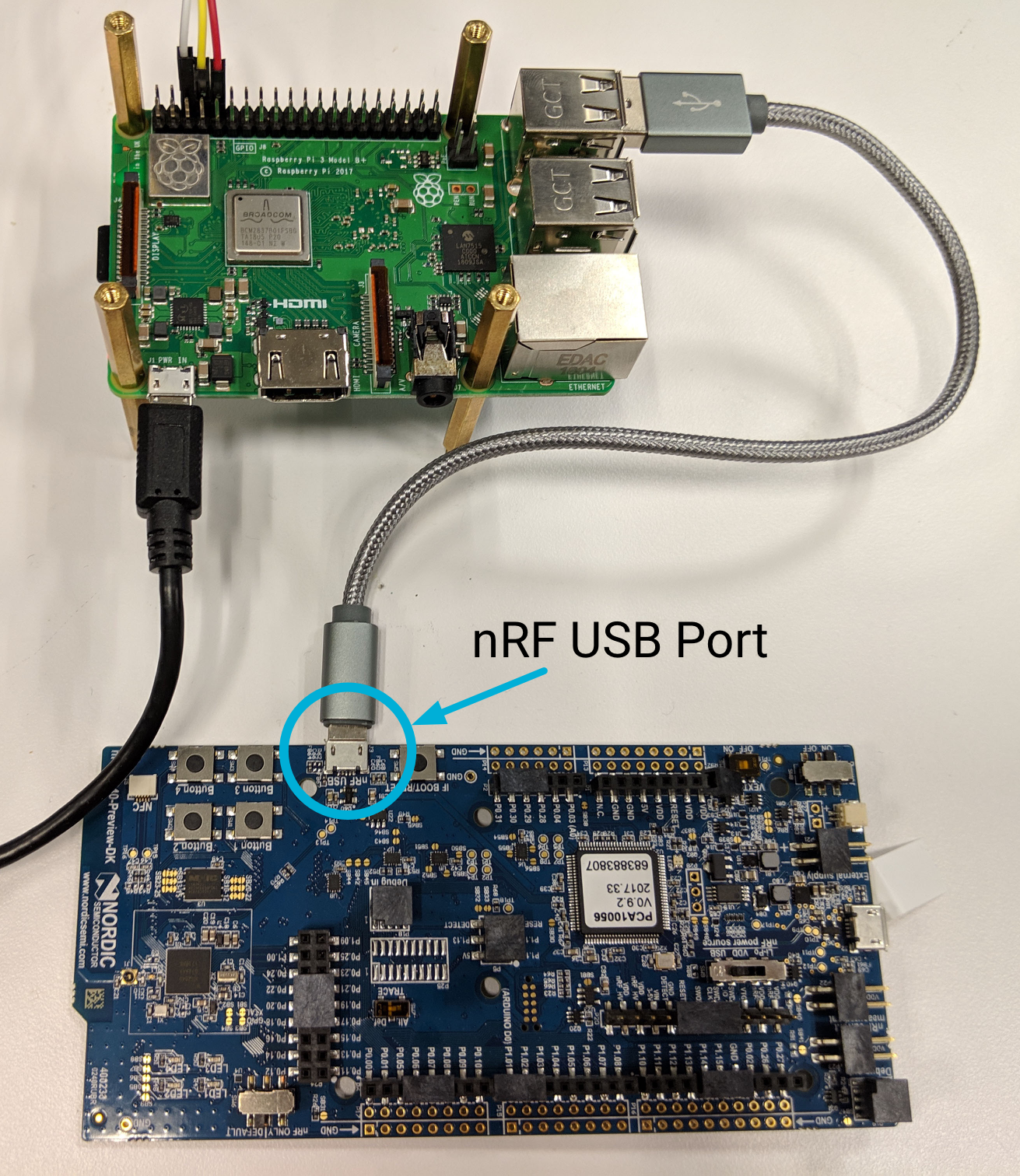
nRF52840 DK kartını NCP olarak yanıp söndürme ve Raspberry Pi'ye bağlama talimatları için Önceden Oluşturulmuş NCP Firmware kılavuzundaki Flash the nRF52840 (nRF52840'ı Yanıp Söndürme) ve Connect the nRF52840 (nRF52840'ı Bağlama) adımlarını inceleyin.
Benzer talimatları OpenThread Hardware Codelab'de de bulabilirsiniz.
Raspberry Pi'yi kurma
İşletim sisteminin nasıl yükleneceği ve cihazın nasıl yapılandırılacağıyla ilgili talimatlar için Raspberry Pi 3B (RPi3B) Border Router platform sayfasındaki Download and install the OS step (İşletim sistemini indirme ve yükleme adımı) bölümüne bakın.
Normal RPi3B kurulumuna ve yapılandırmasına ek olarak git ve bazı önerilen yardımcı programları yükleyin:
sudo apt-get install git screen tcpdumpOpenThread sınır yönlendiriciyi ayarlama
- OpenThread Border Router deposunu kopyalayın ve Thread
Certified 2018-08-19
sürümüne geçin:
git clone https://github.com/openthread/ot-br-posixcd ot-br-posixgit checkout -b thread-br-certified-20180819 - Bağımlılıkları yükleyin:
./script/bootstrap - OTBR sertifikası için
wpantundOTBR sertifikası onaylama işlemini kullanarak OTBR vewpantund'yı derleyin ve yükleyin:WPANTUND_COMMIT=8c189c6 ./script/setup /etc/wpantund.confuygulamasını açın ve nRF52840 DK NCP için UART bağlantı noktasını güncelleyin:Config:NCP:SocketPath '/dev/ttyACM0'
wpantundhizmetini yeniden başlatın:sudo service wpantund restart
Border Router artık çalışır durumda olmalıdır. OTBR hakkında daha fazla bilgi için OpenThread Border Router sayfasına bakın.