
قبل المتابعة، ننصحك بالاطّلاع على OpenThread Hardware Codelab الذي يوضّح بالتفصيل كيفية إعداد بيئتك وتثبيت جميع الأدوات والبرامج اللازمة لتثبيت برنامج nRF52840 DK المستخدَم في هذا الدليل.
إنشاء OpenThread
- استنسِخ مستودع OpenThread، ثم انتقِل إلى إصدار Thread Reference
2018-09-26
باستخدام الأمر التالي:
git clone https://github.com/openthread/openthreadcd openthreadgit checkout -b thread-reference-20180926 - ثبِّت مجموعة أدوات GNU والتبعيات الأخرى:
./script/bootstrap - أنشئ مثال nRF52840. يتيح مفتاح التبديل
USB=1استخدام بروتوكول CDC ACM الأصلي عبر USB كوسيلة نقل تسلسلية.make -f examples/Makefile-nRF52840 BORDER_AGENT=1 BORDER_ROUTER=1 COMMISSIONER=1 \ DHCP6_CLIENT=1 DHCP6_SERVER=1 JOINER=1 MAC_FILTER=1 REFERENCE_DEVICE=1 \ UDP_FORWARD=1 USB=1
تفعيل ميزة "الاتصال بدون إنترنت" وربطها
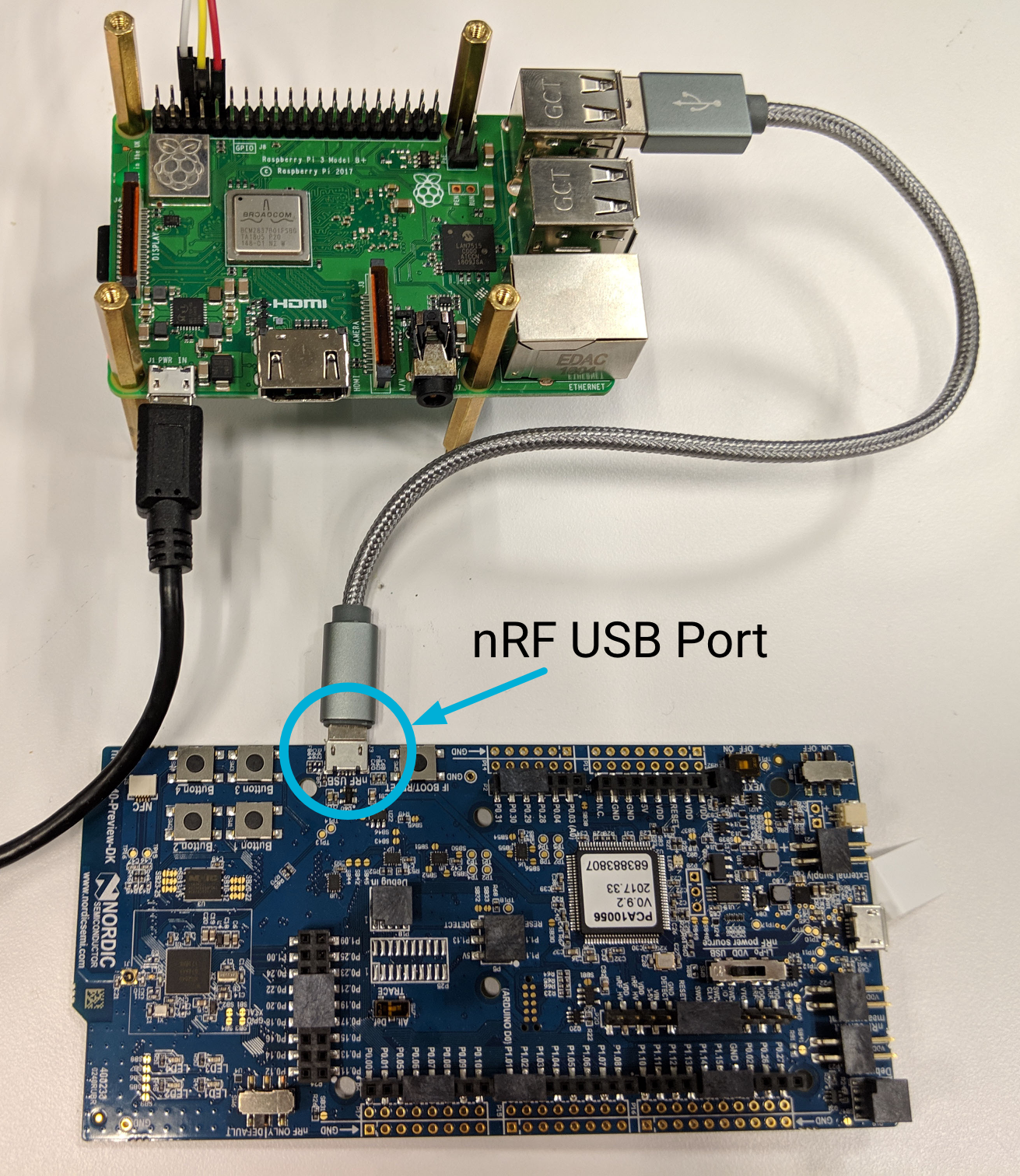
راجِع الخطوتَين تثبيت برنامج nRF52840 وربط nRF52840 من دليل البرامج الثابتة NCP المُنشأة مسبقًا للحصول على تعليمات حول كيفية تثبيت برنامج لوحة nRF52840 DK كبرنامج NCP وربطها بجهاز Raspberry Pi.
تتوفّر تعليمات مشابهة أيضًا في درس OpenThread التطبيقي حول الأجهزة.
إعداد Raspberry Pi
راجِع خطوة تنزيل نظام التشغيل وتثبيته من صفحة منصة Raspberry Pi 3B (RPi3B) Border Router للحصول على تعليمات حول كيفية تثبيت نظام التشغيل وإعداد الجهاز.
بالإضافة إلى عملية الإعداد والضبط العادية لجهاز RPi3B، عليك تثبيت git وبعض الأدوات الموصى بها:
sudo apt-get install git screen tcpdumpإعداد جهاز توجيه حدود OpenThread
- استنسِخ مستودع OpenThread Border Router، ثم انتقِل إلى إصدار Thread
Certified 2018-08-19:
git clone https://github.com/openthread/ot-br-posixcd ot-br-posixgit checkout -b thread-br-certified-20180819 - ثبِّت التبعيّات:
./script/bootstrap - يمكنك تجميع وتثبيت OTBR و
wpantundباستخدام عملية الالتزام بشهادة OTBR لـwpantund:WPANTUND_COMMIT=8c189c6 ./script/setup - افتح
/etc/wpantund.confوعدِّل منفذ UART لجهاز nRF52840 DK NCP:Config:NCP:SocketPath '/dev/ttyACM0'
- أعِد تشغيل خدمة
wpantund:sudo service wpantund restart
من المفترض أن يكون جهاز توجيه الحدود جاهزًا للاستخدام الآن. يمكنك الاطّلاع على جهاز توجيه حدود OpenThread للحصول على مزيد من المعلومات حول OTBR.