
1. 소개

OpenThread는 사물 인터넷 (IoT) 기기용으로 설계된 강력하고 안전한 무선 메시 네트워킹 프로토콜인 Thread® 네트워킹 프로토콜의 오픈소스 구현입니다. OpenThread는 Google의 Nest팀에서 개발했으며 개발자 커뮤니티에서 오픈소스 프로젝트로 자유롭게 사용할 수 있습니다.
스레드 사양은 스마트 홈과 상업용 건물에서 흔히 볼 수 있는 리소스 제약이 있는 기기를 위한 안정적이고 안전하며 에너지 효율적인 무선 통신 프로토콜을 설정합니다. OpenThread에는 IPv6, 6LoWPAN, MAC 보안이 적용된 IEEE 802.15.4, 메시 링크 설정, 메시 라우팅 등 Thread 내의 전체 네트워크 계층 범위가 포함됩니다.
Telink는 OpenThread 구현을 Zephyr RTOS에 통합하여 Telink 하드웨어와의 원활한 호환성을 지원합니다. 이 통합의 소스 코드는 GitHub에서 쉽게 액세스할 수 있으며 소프트웨어 개발 키트 (SDK)로도 제공됩니다.
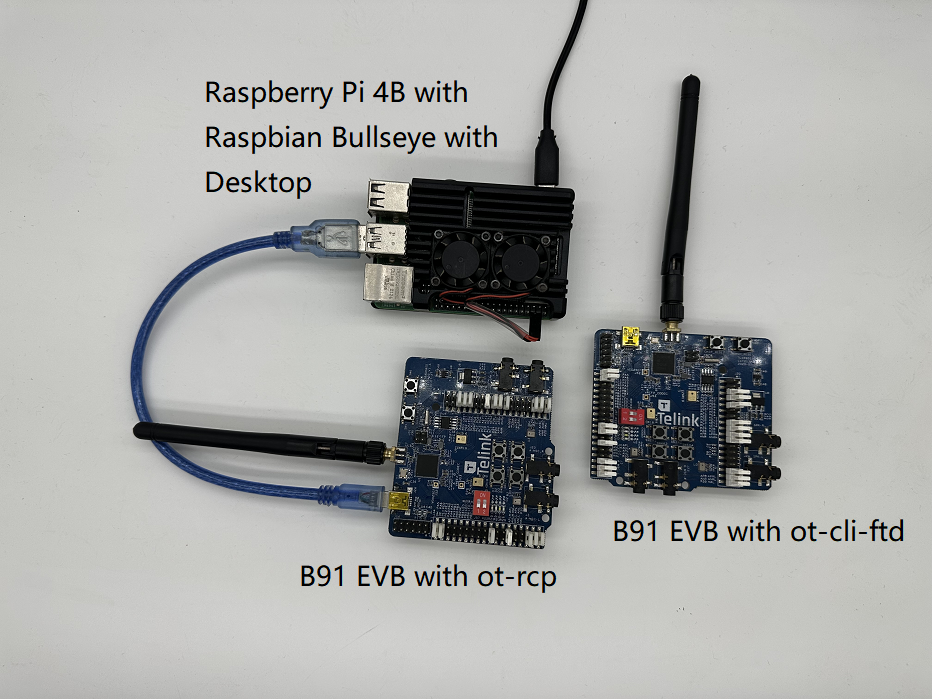
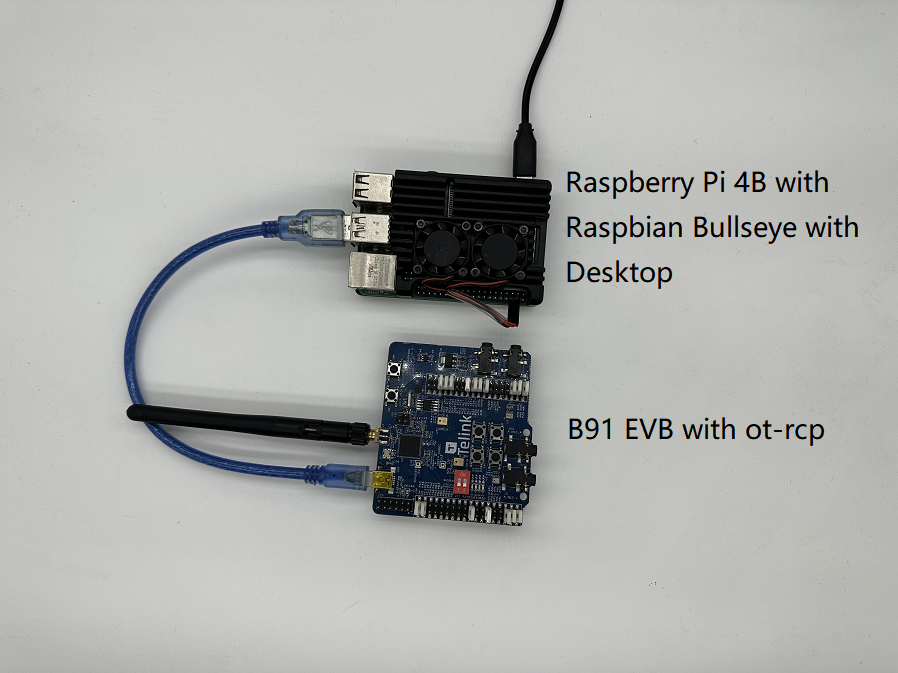
이 Codelab에서는 실제 하드웨어에서 OpenThread를 프로그래밍하고, 스레드 네트워크를 만들고 관리하며, 노드 간에 메시지를 교환합니다. 아래 이미지는 Codelab의 OT 테두리 라우터 (OTBR)와 하나의 스레드 기기를 보여주는 하드웨어 설정을 보여줍니다.
학습할 내용
- Telink Zephyr 개발 환경을 사용하여 OpenThread 구현을 설정합니다.
- OpenThread CLI 샘플 (
ot-cli-ftd및ot-rcp)을 빌드하고 Telink B91 개발 보드에 플래시합니다. - Raspberry Pi 3B 이상에서 Docker를 사용하여 OpenThread Border Router (OTBR)를 설정합니다.
- OTBR에서 스레드 네트워크를 만듭니다.
- 대역 외 디버깅을 사용하여 스레드 네트워크에 기기를 추가합니다.
- CLI를 사용하여 스레드 네트워크의 노드 간 연결을 검증합니다.
필요한 항목
하드웨어:
- B91 개발 보드 2개
- Raspbian OS 이미지가 설치된 Raspberry Pi 3B 이상
- USB 포트가 2개 이상 있는 Linux 머신
- 인터넷에 연결된 스위치 (또는 라우터)와 여러 개의 이더넷 케이블
소프트웨어:
- Telink Burning and Debugging Tool(Telink 굽기 및 디버깅 도구)인 LinuxBDT
- PuTTY와 같은 직렬 포트 터미널 도구
- Git, West와 같은 기타 도구
2. 기본 요건
스레드 개념 및 OpenThread CLI
이 Codelab을 시작하기 전에 OpenThread 시뮬레이션 Codelab을 통해 기본적인 Thread 개념과 OpenThread CLI를 숙지하는 것이 좋습니다.
Linux 머신
Linux 시스템 (Ubuntu v20.04 LTS 이상)은 Telink Zephyr 개발 환경을 설정하고 모든 스레드 개발 보드를 플래시하는 빌드 시스템 역할을 합니다. 이러한 작업을 완료하려면 Linux 컴퓨터에 사용 가능한 USB 포트 2개와 인터넷 연결이 필요합니다.
직렬 포트 연결 및 터미널
기기를 Linux 머신의 USB 포트에 직접 연결할 수 있습니다. 또한 기기에 액세스하려면 직렬 포트 터미널 도구가 필요합니다.
이 Codelab에서는 터미널 도구 PuTTY를 사용하여 FTD 조이너와 Raspberry Pi를 제어합니다. 이 Codelab에서는 을 사용하여 사용 개요를 제공하지만, 다른 터미널 소프트웨어를 사용해도 됩니다.
Telink B91 개발 키트
이 Codelab에는 B91 개발 키트가 두 세트 필요합니다. 아래 사진은 필수 구성요소를 한 세트로 보여줍니다.
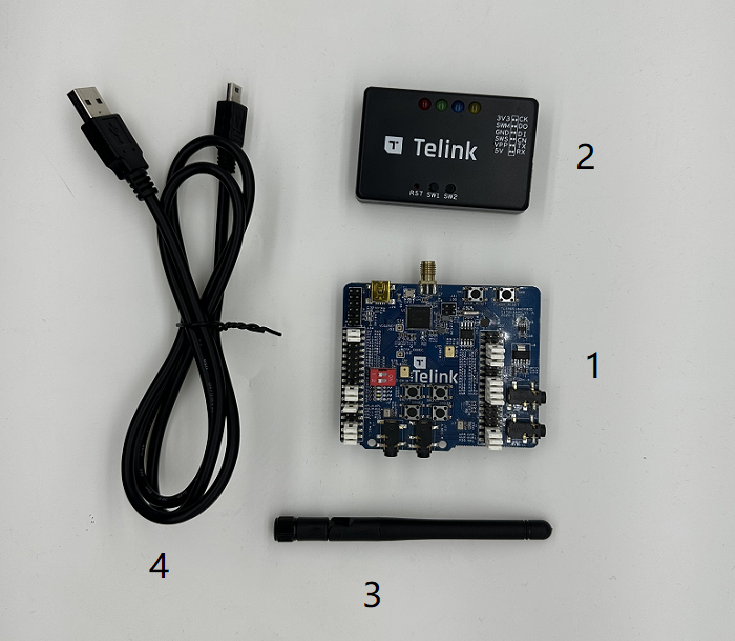
이러한 키트 중 하나는 RCP (라디오 공동 프로세서)로 사용되고 다른 하나는 FTD (전체 스레드 기기)로 작동합니다. 아직 키트를 보유하고 있지 않다면 Telink 공식 웹사이트에서 자세한 내용을 확인하세요. 사용할 구성요소는 다음과 같습니다.
색인 | 이름 |
1 | Telink B91 개발 보드 |
2 | Telink Burning Board |
3 | 2.4Ghz 안테나 |
4 | USB 케이블 (USB A to mini USB) |
Raspbian OS 이미지가 설치된 Raspberry Pi 3B 이상
이 Codelab에서는 Raspbian Bullseye Lite OS 이미지 또는 Raspbian Bullseye with Desktop이 설치된 Raspberry Pi 3B 이상이 필요합니다. 이더넷을 통해 인터넷에 연결되며 OpenThread Border Router (OTBR)의 호스트로 구성됩니다.
네트워크 연결
인터넷에 연결된 스위치 (또는 라우터)와 여러 개의 이더넷 케이블 Raspberry Pi를 Linux 머신에 연결하여 호스트를 통해 Raspberry Pi의 사용자 구성을 용이하게 하는 데 사용됩니다.
LinuxBDT
모든 Telink 칩 시리즈에 적용되는 Telink Burning and Debugging Tool (BDT)을 사용하면 Telink B91 개발 보드에 OpenThread 펌웨어를 삭제하고 플래시할 수 있습니다. Linux 머신에 X86 기반 Linux 버전 linuxBDT를 설치합니다.
기타
- Telink Zephyr 개발 환경 설정용 Git
- Zephyr 프로젝트를 관리하고 OpenThread 바이너리를 빌드합니다.
3. 펌웨어 설정
Telink Zephyr 개발 환경 설정
Linux 머신에서 CLI 터미널을 열고 다음 명령어를 실행하여 APT가 최신 상태인지 확인합니다.
$ sudo apt update $ sudo apt upgrade
이 작업이 완료되면 다음 단계를 진행합니다.
- 종속 항목을 설치합니다.
$ wget https://apt.kitware.com/kitware-archive.sh $ sudo bash kitware-archive.sh $ sudo apt install --no-install-recommends git cmake ninja-build \ gperf ccache dfu-util device-tree-compiler python3-dev python3-pip \ python3-setuptools python3-tk python3-wheel xz-utils file make gcc \ gcc-multilib g++-multilib libsdl2-dev
$ cmake --version $ python3 --version $ dtc --version
- west를 설치합니다.
$ pip3 install --user -U west $ echo 'export PATH=~/.local/bin:"$PATH"' >> ~/.bashrc $ source ~/.bashrc
~/.local/bin이$PATH환경 변수에 있는지 확인합니다. - Zephyr 프로젝트 소스 코드를 가져옵니다.
$ west init ~/zephyrproject $ cd ~/zephyrproject $ west update $ west blobs fetch hal_telink $ west zephyr-export
- Zephyr의 추가 Python 종속 항목을 설치합니다.
$ pip3 install --user -r ~/zephyrproject/zephyr/scripts/requirements.txt
- Zephyr 도구 모음을 설정합니다. 대부분의 보드를 플래시할 수 있도록 Zephyr 도구 모음 (약 1~2GB)을 로컬 디렉터리에 다운로드합니다.
$ wget https://github.com/zephyrproject-rtos/sdk-ng/releases/download/v0.16.1/zephyr-sdk-0.16.1_linux-x86_64.tar.xz $ wget -O - https://github.com/zephyrproject-rtos/sdk-ng/releases/download/v0.16.1/sha256.sum | shasum --check --ignore-missing
$HOME/zephyr-sdk[-x.y.z] $HOME/.local/zephyr-sdk[-x.y.z] $HOME/.local/opt/zephyr-sdk[-x.y.z] $HOME/bin/zephyr-sdk[-x.y.z] /opt/zephyr-sdk[-x.y.z] /usr/zephyr-sdk[-x.y.z] /usr/local/zephyr-sdk[-x.y.z]
$ tar xvf zephyr-sdk-0.16.1_linux-x86_64.tar.xz $ cd zephyr-sdk-0.16.1 $ ./setup.sh -t riscv64-zephyr-elf -h -c
- Hello World 예시를 빌드합니다. 먼저 Hello World 예시를 사용하여 공식 Zephyr 프로젝트 구성이 올바른지 확인한 다음 맞춤 프로젝트 설정을 진행합니다.
$ cd ~/zephyrproject/zephyr $ west build -p auto -b tlsr9518adk80d samples/hello_world
build/zephyr directory아래에서zephyr.bin라는 펌웨어를 찾을 수 있습니다. ~/.bashrc에 Zephyr 환경 스크립트를 추가합니다. 다음 명령어를 실행합니다.$ echo "source ~/zephyrproject/zephyr/zephyr-env.sh" >> ~/.bashrc $ source ~/.bashrc
- Telink Zephyr 원격 저장소를 추가합니다. Telink 저장소를 개발 브랜치로 로컬에 다운로드하고 업데이트합니다.
$ cd ~/zephyrproject/zephyr $ git remote add telink-semi https://github.com/telink-semi/zephyr $ git fetch telink develop $ git checkout develop $ west update $ west blobs fetch hal_telink
자세한 내용은 Zephyr 문서 – 시작 가이드를 참고하세요.
Telink LinuxBDT 설정
Telink LinuxBDT 도구를 다운로드하고 Linux 머신의 로컬 디렉터리(예: 홈 디렉터리 ~)에 추출하여 B91 개발 보드에 펌웨어를 플래시할 수 있습니다.
$ cd ~ $ wget http://wiki.telink-semi.cn/tools_and_sdk/Tools/BDT/LinuxBDT.tar.bz2 $ tar -vxf LinuxBDT.tar.bz2
USB 인터페이스를 통해 Burning Board를 Linux 컴퓨터에 연결한 후 다음 명령어를 입력합니다.
$ cd LinuxBDT $ sudo ./bdt lsusb -v Bus 002 Device 001: ID 1d6b:0003 xHCI Host Controller Bus 001 Device 003: ID 0bda:565a Integrated_Webcam_HD Bus 001 Device 023: ID 413c:301a Dell MS116 USB Optical Mouse Bus 001 Device 037: ID 248a:826a Telink Web Debugger v3.6 Bus 001 Device 001: ID 1d6b:0002 xHCI Host Controller
'Telink Web Debugger v3.6'이라는 메시지가 표시되면 BDT 프로그래머가 Linux 머신에 성공적으로 연결된 것입니다.
펌웨어 컴파일
이 Codelab에서는 다음 두 가지 유형의 OpenThread 펌웨어를 빌드합니다.
ot-cli-ftd- 및
ot-rcp
컴파일 방법은 다음과 같습니다.
- 라디오 공동 프로세서(
ot-rcp)$ cd ~/zephyrproject $ rm -rf build_ot_coprocessor $ west build -b tlsr9518adk80d -d build_ot_coprocessor zephyr/samples/net/openthread/coprocessor -- -DDTC_OVERLAY_FILE="usb.overlay" -DOVERLAY_CONFIG=overlay-rcp-usb-telink.conf
- 대화형 명령줄 (
ot-cli-ftd)이 있는 모든 기능을 갖춘 스레드 기기$ cd ~/zephyrproject $ rm -rf build_ot_cli_ftd $ west build -b tlsr9518adk80d -d build_ot_cli_ftd zephyr/samples/net/openthread/cli -- -DOVERLAY_CONFIG=overlay-telink-fixed-mac.conf -DCONFIG_OPENTHREAD_FTD=y
펌웨어 플래시
아래 그림과 같이 USB 케이블을 사용하여 B91 개발 보드를 버닝 보드에 연결합니다.
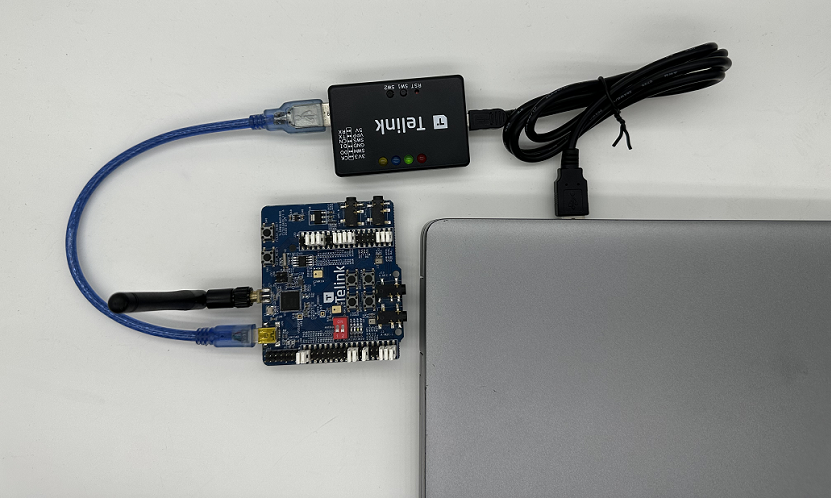
명령줄에서 다음 명령어를 실행하여 펌웨어 번인을 실행합니다 (ot-cli-ftd 펌웨어 플래싱을 예로 사용).
$ cd ~/zephyrproject/build_ot_cli_ftd/zephyr $ cp zephyr.bin ~/LinuxBDT/bin/ot-cli-ftd.bin $ cd ~/LinuxBDT $ sudo ./bdt 9518 ac Activate OK! $ sudo ./bdt 9518 wf 0 -i bin/ot-cli-ftd.bin EraseSectorsize... Total Time: 2181 ms Flash writing... [100%][-] [##################################################] File Download to Flash at address 0x000000: 491700 bytes Total Time: 30087 ms
ot-rcp의 플래시 메서드는 기본적으로 ot-cli-ftd의 플래시 메서드와 동일합니다. 하지만 펌웨어 경로와 이름에는 차이가 있습니다.
플래시 후에는 두 B91 개발 보드를 적절하게 표시하여 구분합니다. ot-cli-ftd로 플래시된 보드에 'FTD Joiner'라는 라벨을 지정하고 ot-rcp로 플래시된 보드에 'RCP'라는 라벨을 지정합니다.
4. FTD 조이너 기기의 직렬 콘솔 구성
그림에 표시된 것처럼 FTD 조이너를 Linux 머신의 USB 포트에 직접 연결합니다.
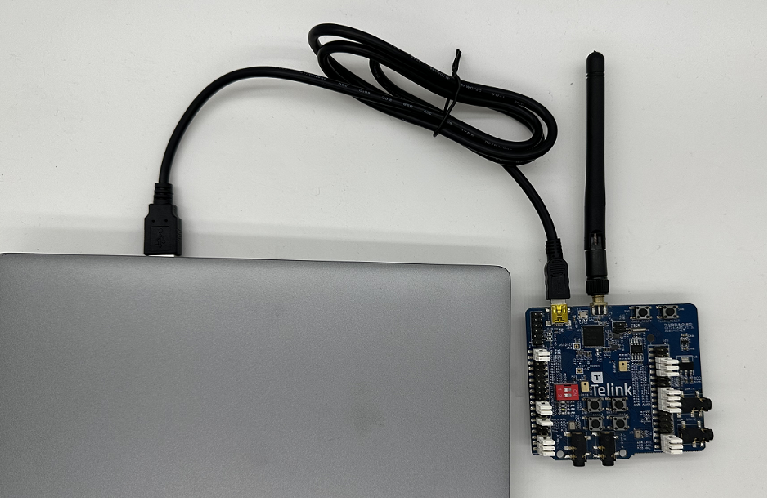
FTD 조이너 기기를 Linux 머신에 연결한 후 PuTTY를 엽니다. 그런 다음 새 터미널을 만들고 직렬 포트 정보를 설정하고 직렬 포트를 엽니다.
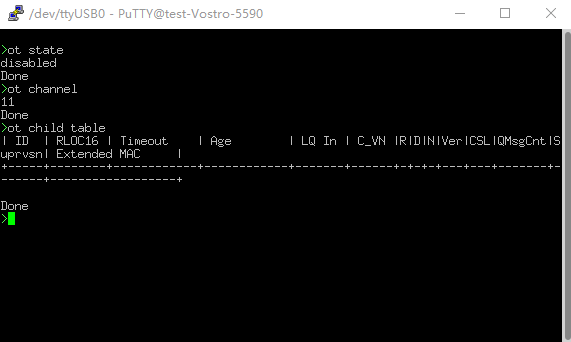
OpenThread 명령줄 참조는 OpenThread CLI 참조를 참고하세요. 모든 명령어에 ot를 접두사로 붙여야 합니다.
예:
> ot state disabled Done > ot channel 11 Done >
5. Raspberry Pi를 OpenThread Border Router로 설정
OpenThread 테두리 라우터는 다음 두 가지 주요 부분으로 구성된 기기입니다.
- Raspberry Pi에는 보더 라우터 (BR) 역할을 하는 데 필요한 모든 서비스와 펌웨어가 포함되어 있습니다.
- RCP는 스레드 통신을 담당합니다.
라디오 공동 프로세서(RCP)
ot-rcp 펌웨어를 플래시하려면 ot-cli-ftd 펌웨어 플래시 프로세스와 동일한 단계를 따르세요. 아래 그림과 같이 B91 개발 보드를 Raspberry Pi의 USB 포트에 연결합니다.
Raspberry Pi
- Raspbian Bullseye Lite OS 이미지 또는 Raspbian Bullseye with Desktop이 SD 카드에 올바르게 작성되었는지 확인합니다.
- Raspberry Pi에 SSH로 연결하거나 Raspbian 데스크톱을 직접 사용할 수 있습니다. 이 Codelab에서는 SSH를 사용합니다.
- 다음 단계에서 OTBR Docker를 설치하기 전에 먼저 로컬 저장소와 패키지 관리자를 업데이트해야 합니다.
$ sudo apt-get update $ sudp apt-get upgrade
Docker 설치
이전 단계에서 로컬 저장소와 패키지 관리자 APT만 업데이트한 경우 Raspberry Pi를 재부팅한 후 SSH 터미널 창을 엽니다.
- Docker를 설치합니다.
$ curl -sSL https://get.docker.com | sh
- 각 명령어 앞에
sudo를 추가하지 않아도 되도록 현재 계정을 Docker 그룹에 넣어 권한을 부여합니다.$ sudo usermod -aG docker $USER
- Docker가 시작되지 않은 경우 시작합니다.
$ sudo dockerd
- OTBR 방화벽 스크립트는 Docker 컨테이너 내에서 규칙을 생성합니다. 그 전에
modprobe를 실행하여 iptables의 커널 모듈을 로드합니다.$ sudo modprobe ip6table_filter
Docker 구성 및 실행
이 Codelab에서는 OpenThread Docker Hub에서 OTBR Docker 이미지를 직접 가져옵니다. 이 이미지는 OpenThread팀에서 테스트하고 확인했습니다.
- 최신 이미지를 가져옵니다.
$ docker pull openthread/otbr:latest
- Docker 컨테이너에서 이미지 목록을 확인합니다.
$ docker images REPOSITORY TAG IMAGE ID CREATED SIZE openthread/otbr latest db081f4de15f 6 days ago 766MB
/dev를 확인하여 RCP 기기의 직렬 포트 이름을 확인합니다.ttyACM0는 RCP가 올바르게 연결되었음을 나타냅니다.$ ls /dev/tty* ... /dev/ttyACM0 ...
- OTBR Docker를 처음 실행하고 RCP의 직렬 포트 (
ttyACM0)를 참조합니다. 이 OTBR Docker를 계속 사용하려면 docker start otbr 명령어를 사용하세요.$ docker run --name "otbr" --sysctl "net.ipv6.conf.all.disable_ipv6=0 net.ipv4.conf.all.forwarding=1 net.ipv6.conf.all.forwarding=1" -p 8080:80 --dns=127.0.0.1 -it --volume /dev/ttyACM0:/dev/ttyACM0 --privileged openthread/otbr --radio-url spinel+hdlc+uart:///dev/ttyACM0
- 새 SSH 터미널 창을 열어 Raspberry Pi와 RCP 간의 연결을 테스트합니다.
$ docker exec -ti otbr sh -c "sudo ot-ctl" > state disabled Done
선택적 Docker 명령어:
- 실행 중인 Docker 컨테이너에 관한 정보를 가져옵니다.
$ docker ps -aq
- OTBR Docker를 중지합니다.
$ docker stop otbr
- OTBR Docker 삭제:
$ docker rm otbr
- OTBR Docker를 다시 로드합니다.
$ docker restart otbr
이 시점에서 FTD Joiner 기기와 OTBR이 준비되었으며 다음 단계로 진행하여 스레드 네트워크를 빌드할 수 있습니다.
6. 스레드 네트워크 만들기
RCP에서 스레드 네트워크 만들기
OTBR에서 ot-ctl 셸을 사용하여 스레드 네트워크를 설정합니다. 이전 섹션에서 셸을 종료한 경우 다음 명령어를 입력하여 SSH 터미널에서 다시 시작합니다.
$ docker exec -ti otbr sh -c "sudo ot-ctl"
그런 다음 표에 지정된 순서대로 명령어를 입력하고 각 단계에서 예상한 결과가 나오는지 확인한 후 다음 단계로 진행합니다.
색인 | 명령어 | 소개 | 예상 대답 | ||
1 |
| 새 무작위 네트워크 데이터 세트를 만듭니다. | 완료 | ||
2 |
| 새 데이터 세트를 비휘발성 스토리지의 활성 운영 데이터 세트에 커밋합니다. | 완료 | ||
3 |
| IPv6 인터페이스를 가져옵니다. | 완료 | ||
4 |
| 스레드 프로토콜 작동을 사용 설정하고 스레드 네트워크에 연결합니다. | 완료 | ||
스레드 인터페이스가 작동될 때까지 10초 동안 기다립니다. | |||||
5 |
| 기기 상태를 확인합니다.이 명령어는 리더가 되고 다음 단계로 이동할 때까지 여러 번 호출할 수 있습니다. | 리더 | ||
6 |
| 활성 운영 데이터 세트를 완전히 확인하고 네트워크 키를 기록합니다. | 활성 타임스탬프: 1 | ||
네트워크 생성 중에 OTBR에서 무작위로 생성된 네트워크 키는 ot-cli-ftd 기기가 이 스레드 네트워크에 가입할 때 사용됩니다.
대역 외 커미셔닝을 통해 스레드에 FTD 조이너 추가
대역 외 커미셔닝은 무선 방식이 아닌 방식 (예: OpenThread CLI에서 수동으로 입력)을 통해 네트워크에 참여하기를 기다리는 기기에 네트워크 사용자 인증 정보를 전송하는 것을 말합니다. FTD 조이너의 직렬 콘솔에 다음 명령어를 순서대로 입력합니다.
색인 | 명령어 | 소개 | 예상 응답 | ||
1 |
| 기기가 스레드 네트워크에 연결하려면 네트워크 키만 있으면 됩니다. | 완료 | ||
2 |
| 새 데이터 세트를 비휘발성 스토리지의 활성 운영 데이터 세트에 커밋합니다. | 완료 | ||
3 |
| IPv6 인터페이스를 가져옵니다. | 완료 | ||
4 |
| 스레드 프로토콜 작동을 사용 설정하고 스레드 네트워크에 연결합니다. | 완료 | ||
기기가 참여하고 자체적으로 구성될 때까지 20초 동안 기다립니다. | |||||
5 |
| 기기 상태를 확인합니다. | child/router | ||
토폴로지
SSH 터미널에 ipaddr, child table, router table와 같은 명령어를 입력하여 다음 코드 스니펫과 같은 응답을 받습니다.
> ipaddr rloc fd8c:60bc:a98:c7ba:0:ff:fe00:b000 Done > child table | ID | RLOC16 | Timeout | Age | LQ In | C_VN |R|D|N|Ver|CSL|QMsgCnt|Suprvsn| Extended MAC | +-----+--------+------------+------------+-------+------+-+-+-+---+---+-------+-------+------------------+ | 1 | 0xb001 | 240 | 23 | 3 | 51 |1|1|1| 3| 0 | 0 | 129 | 82bc12fbe783468e | Done > router table | ID | RLOC16 | Next Hop | Path Cost | LQ In | LQ Out | Age | Extended MAC | Link | +----+--------+----------+-----------+-------+--------+-----+------------------+------+ | 44 | 0xb000 | 63 | 0 | 0 | 0 | 0 | 7ae354109d611f7e | 0 | Done ... > child table | ID | RLOC16 | Timeout | Age | LQ In | C_VN |R|D|N|Ver|CSL|QMsgCnt|Suprvsn| Extended MAC | +-----+--------+------------+------------+-------+------+-+-+-+---+---+-------+-------+------------------+ Done > router table | ID | RLOC16 | Next Hop | Path Cost | LQ In | LQ Out | Age | Extended MAC | Link | +----+--------+----------+-----------+-------+--------+-----+------------------+------+ | 33 | 0x8400 | 63 | 0 | 3 | 3 | 13 | e61487c1cda940a6 | 1 | | 44 | 0xb000 | 63 | 0 | 0 | 0 | 0 | 7ae354109d611f7e | 0 | Done
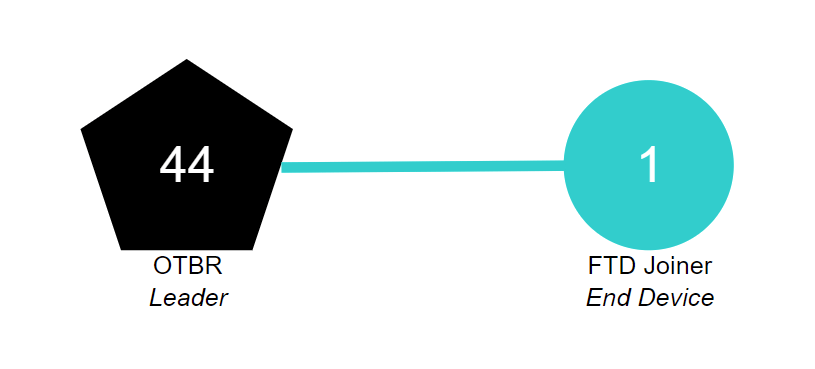
OTBR의 RLOC16는 0xb000이고 FTD 조이너의 RLOC16는 처음에는 0xb001입니다. 그런 다음 라우터 ID를 획득한 후 FTD 조이너의 RLOC16가 0x8400가 됩니다. FTD 조이너가 하위 요소에서 라우터로 업그레이드된 것을 확인할 수 있습니다.
현재 스레드 네트워크에는 두 개의 노드가 포함되어 있으며 토폴로지는 아래 그림과 같습니다.
7. 스레드 기기 간 통신
ICMPv6 통신
동일한 네트워크에 있는 스레드 기기가 서로 통신할 수 있는지 확인하기 위해 ping 명령어를 사용합니다. 먼저 ipaddr 명령어를 사용하여 기기의 RLOC를 가져옵니다.
> ipaddr fd8c:60bc:a98:c7ba:0:ff:fe00:fc11 fdbd:7274:649c:1:1d19:9613:f705:a5af fd8c:60bc:a98:c7ba:0:ff:fe00:fc10 fd8c:60bc:a98:c7ba:0:ff:fe00:fc38 fd8c:60bc:a98:c7ba:0:ff:fe00:fc00 fd8c:60bc:a98:c7ba:0:ff:fe00:b000 # Routing Locator (RLOC) fd8c:60bc:a98:c7ba:5249:34ab:26d1:aff6 fe80:0:0:0:78e3:5410:9d61:1f7e Done
FTD 조이너의 직렬 콘솔에 다음 명령어를 입력하여 핑 작업을 실행합니다.
> ot ping fd8c:60bc:a98:c7ba:0:ff:fe00:b000 16 bytes from fd8c:60bc:a98:c7ba:0:ff:fe00:b000: icmp_seq=1 hlim=64 time=19ms 1 packets transmitted, 1 packets received. Packet loss = 0.0%. Round-trip min/avg/max = 19/19.0/19 ms. Done
직렬 포트의 출력 응답은 OTBR 측에서 핑 요청을 수신했고 FTD 조이너가 OTBR에서 반환된 핑 응답을 수신했음을 나타냅니다. 두 기기 간 통신이 성공했습니다.
UDP 통신
OpenThread에서 제공하는 애플리케이션 서비스에는 UDP도 포함됩니다. UDP API를 사용하여 스레드 네트워크의 노드 간에 정보를 전달하거나 Border Router를 통해 외부 네트워크에 정보를 전달할 수 있습니다. OpenThread의 UDP API에 관한 자세한 소개는 OpenThread CLI - UDP 예시를 참고하세요. 이 Codelab에서는 OTBR과 FTD 조이너 간에 정보를 전송하기 위해 이러한 API 중 일부를 사용합니다.
먼저 OTBR의 메시 로컬 EID를 가져옵니다. 이 주소는 스레드 기기의 IPv6 주소 중 하나이며 동일한 스레드 네트워크 파티션의 스레드 기기에 액세스하는 데 사용할 수 있습니다.
> ipaddr mleid fd8c:60bc:a98:c7ba:5249:34ab:26d1:aff6 Done
SSH 터미널에 다음 명령어를 입력하여 OTBR UDP를 사용 설정하고 기기의 1022 포트를 바인딩합니다.
> udp open Done > udp bind :: 1022 Done
직렬 콘솔에 다음 명령어를 입력하고 FTD Joiner의 UDP를 사용 설정합니다. 기기의 1022 포트를 바인딩한 후 OTBR에 5바이트 hello 메시지를 전송합니다.
> ot udp open Done > ot udp bind :: 1022 Done > ot udp send fd8c:60bc:a98:c7ba:5249:34ab:26d1:aff6 1022 hello Done
SSH 터미널에 다음 정보가 출력됩니다. OTBR은 FTD Joiner로부터 hello 메시지를 수신합니다. 이는 UDP 통신이 성공했음을 의미합니다.
> 5 bytes from fd8c:60bc:a98:c7ba:9386:63cf:19d7:5a61 1022 hello
8. 축하합니다
간단한 스레드 네트워크를 만들고 이 네트워크 내의 통신을 확인했습니다.
이제 다음 사항을 알게 되었습니다.
- Telink Zephyr 개발 환경을 빌드하고 사용하는 방법
ot-cli-ftd및ot-rcp바이너리를 빌드하고 Telink B91 개발 보드에 플래시하는 방법- Docker를 사용하여 Raspberry Pi 3B 이상 버전을 OpenThread Border Router (OTBR)로 설정하는 방법
- OTBR에서 스레드 네트워크를 만드는 방법
- 대역 외 커미셔닝을 통해 스레드 네트워크에 기기를 추가하는 방법
- 스레드 네트워크의 노드 간 연결을 확인하는 방법
추가 자료
openthread.io 및 GitHub에서 다음을 비롯한 다양한 OpenThread 리소스를 확인하세요.
- 지원되는 플랫폼: OpenThread를 지원하는 모든 플랫폼을 알아봅니다.
- OpenThread 빌드: OpenThread 빌드 및 구성에 관한 자세한 내용
- 스레드 기본사항: 이 Codelab에 나온 모든 스레드 개념을 다룹니다.
참조 문서: