
1. מבוא

OpenThread הוא הטמעה בקוד פתוח של פרוטוקול הרשת Thread®, שהוא פרוטוקול רשת אלחוטי חזק ומאובטח מסוג Mesh, שנועד למכשירי האינטרנט של הדברים (IoT). OpenThread פותח על ידי צוות Nest של Google, והוא זמין בחינם לקהילת המפתחים כפרויקט בקוד פתוח.
מפרט Thread קובע פרוטוקול תקשורת אלחוטי אמין, מאובטח וחסכוני באנרגיה למכשירים עם משאבים מוגבלים, שנפוצים בבתים חכמים ובבניינים מסחריים. OpenThread כולל את כל היקף שכבת הרשת ב-Thread, כמו IPv6, 6LoWPAN, IEEE 802.15.4 עם אבטחת MAC, יצירת קישור לרשת Mesh וניתוב רשת Mesh.
חברת Telink שילבה את הטמעת OpenThread ב-Zephyr RTOS, וכך אפשרה תאימות חלקה לחומרה של Telink. קוד המקור של השילוב הזה זמין ב-GitHub, והוא מסופק גם כערכת כלים לפיתוח תוכנה (SDK).
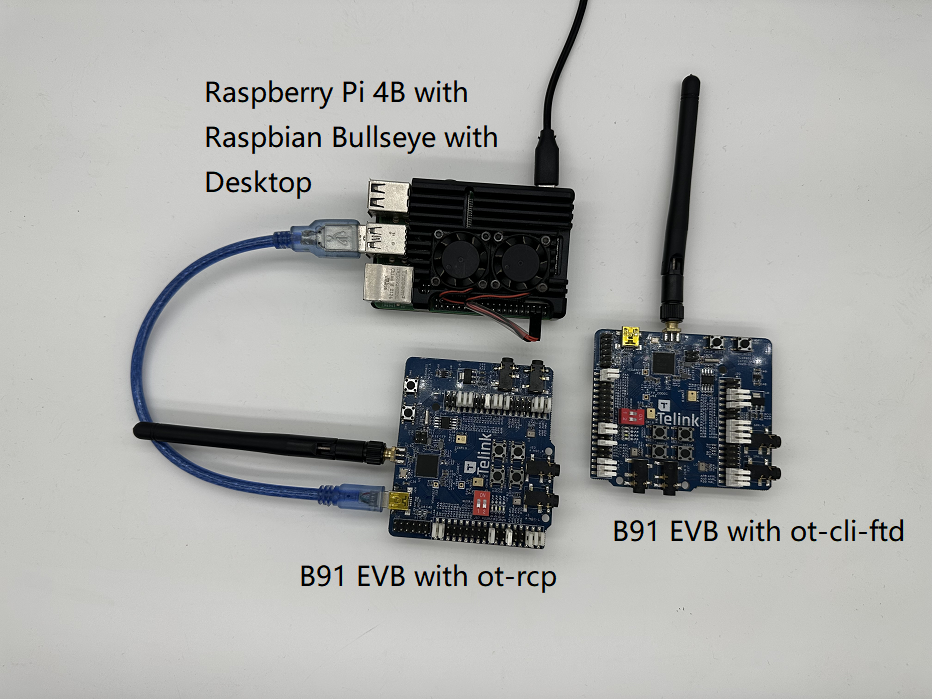
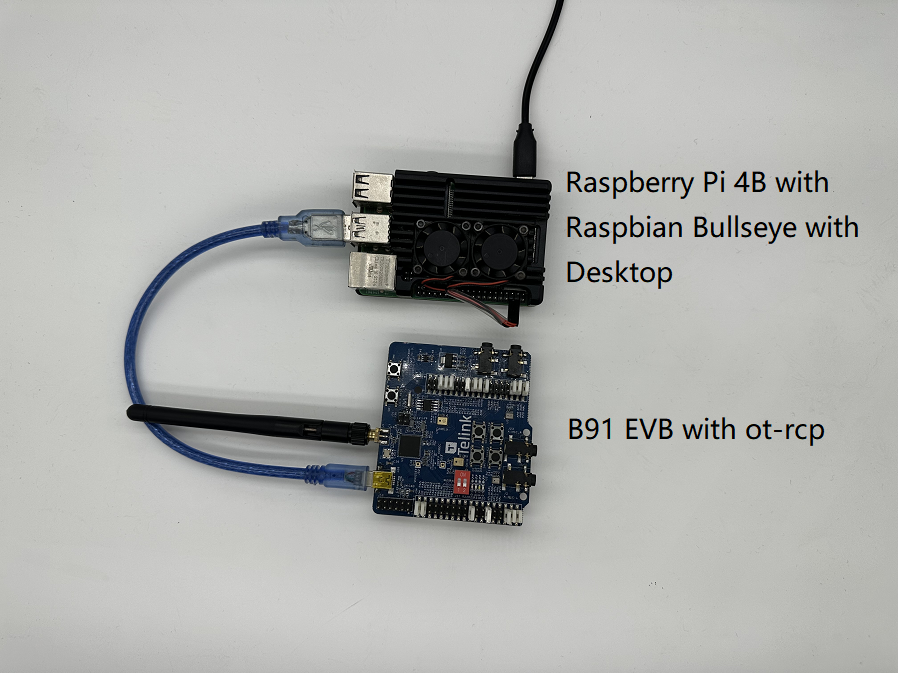
ב-Codelab הזה תלמדו איך לתכנת את OpenThread בחומרה בפועל, ליצור ולנהל רשת פרוטוקול Thread ולהחליף הודעות בין צמתים. בתמונה שלמטה מוצגת הגדרת החומרה, שכוללת נתב גבול OT (OTBR) ומכשיר Thread אחד ב-codelab.
מה תלמדו
- כדי להגדיר הטמעה של OpenThread באמצעות סביבת הפיתוח Telink Zephyr.
- כדי ליצור את הדוגמאות של OpenThread CLI (
ot-cli-ftdו-ot-rcp) ולהעביר אותן ללוחות פיתוח של Telink B91. - כדי להגדיר נתב גבול OpenThread (OTBR) באמצעות Docker ב-Raspberry Pi 3B+ ואילך.
- כדי ליצור רשת Thread ב-OTBR.
- כדי להוסיף מכשירים לרשת Thread באמצעות ניפוי באגים מחוץ לפס.
- כדי לאמת את הקישוריות בין הצמתים ברשת Thread באמצעות CLI.
הדרישות
חומרה:
- שני כרטיסי פיתוח B91.
- Raspberry Pi 3B+ או גרסה מתקדמת יותר עם תמונת מערכת הפעלה Raspbian.
- מחשב Linux עם לפחות שתי יציאות USB.
- מתג (או נתב) שמחובר לאינטרנט וכמה כבלי אתרנט.
תוכנה:
- Telink Burning and Debugging Tool —— LinuxBDT.
- כלי טרמינל של יציאה טורית, כמו PuTTY.
- כלים אחרים, כמו Git ו-West.
2. דרישות מוקדמות
מושגים שקשורים ל-Thread וממשק שורת הפקודה (CLI) של OpenThread
לפני שממשיכים עם ה-codelab הזה, מומלץ לעבור על ה-codelab בנושא סימולציה של OpenThread כדי להכיר את המושגים הבסיסיים של Thread ואת ה-CLI של OpenThread.
מכונת Linux
מכונת Linux (Ubuntu v20.04 LTS ואילך) משמשת כמכונת בנייה להגדרת סביבת הפיתוח של Telink Zephyr ולהצגת כל לוחות הפיתוח של Thread. כדי לבצע את המשימות האלה, למכשיר Linux צריכים להיות שני חיבורי USB פנויים וחיבור לאינטרנט.
חיבור ליציאה טורית ומסופים
אפשר לחבר את המכשיר ישירות ליציאת ה-USB במחשב Linux. בנוסף, תצטרכו כלי מסוף של יציאה טורית כדי לגשת למכשירים.
ב-codelab הזה, כלי הטרמינל PuTTY משמש לשליטה ב-FTD Joiner וב-Raspberry Pi. הוא מספק סקירה כללית של השימוש בו, אבל אפשר להשתמש גם בתוכנות אחרות של מסוף.
Telink B91 Development Kit
ב-codelab הזה צריך שתי ערכות פיתוח B91. בתמונה שלמטה מוצגים הרכיבים המינימליים הנדרשים בסט אחד.
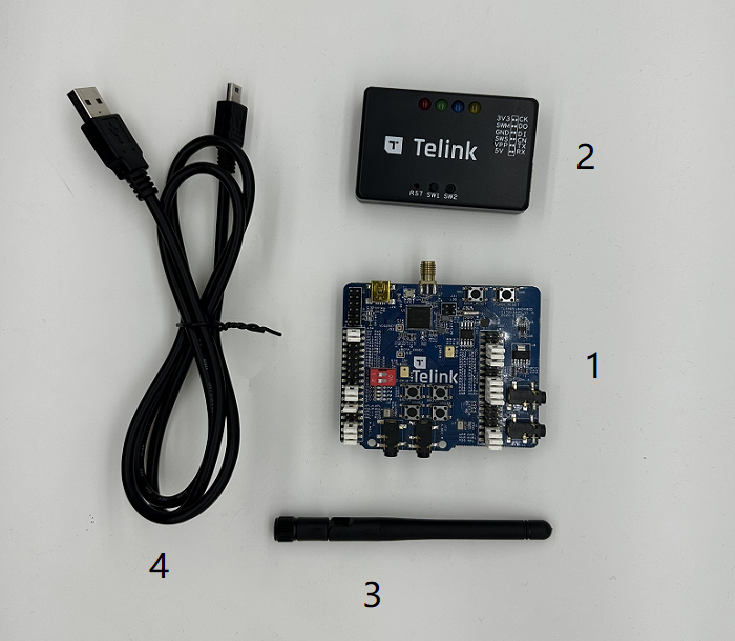
אחד מהערכות האלה ישמש כ-RCP (מעבד משותף של רדיו), והשני ישמש כ-FTD (מכשיר Thread מלא). אם עדיין לא קיבלתם את הערכה, תוכלו לקבל פרטים נוספים באתר הרשמי של Telink. אלה כמה רכיבים שאפשר להשתמש בהם:
אינדקס | שם |
1 | Telink B91 Development Board |
2 | Telink Burning Board |
3 | אנטנה 2.4GHz |
4 | כבל USB (מ-USB A למיני USB) |
Raspberry Pi 3B+ או גרסה מתקדמת יותר עם קובץ אימג' של מערכת ההפעלה Raspbian
ב-codelab הזה נדרש Raspberry Pi 3B+ או גרסה מתקדמת יותר עם תמונת מערכת הפעלה של Raspbian Bullseye Lite או Raspbian Bullseye עם Desktop. הוא מחובר לאינטרנט באמצעות אתרנט ויוגדר כמארח של OpenThread Border Router (OTBR).
חיבור לרשת
מתג (או נתב) שמחובר לאינטרנט וכמה כבלי אתרנט. הם משמשים לחיבור של Raspberry Pi למכונת Linux, ומאפשרים למשתמש להגדיר את Raspberry Pi דרך המארח.
LinuxBDT
Telink Burning and Debugging Tool (BDT), שרלוונטי לכל סדרות השבבים של Telink, מאפשר לכם למחוק ולצרוב קושחת OpenThread בלוחות הפיתוח של Telink B91. מתקינים את גרסת Linux מבוססת X86 linuxBDT במחשב Linux.
אחרים
- Git, להגדרת סביבת הפיתוח של Telink Zephyr.
- West, כדי לנהל פרויקט Zephyr ולבנות קבצים בינאריים של OpenThread.
3. הגדרת קושחה
הגדרה של סביבת הפיתוח Telink Zephyr
במחשב Linux, פותחים טרמינל של CLI ומתחילים בהרצת הפקודות הבאות כדי לוודא ש-APT מעודכן.
$ sudo apt update $ sudo apt upgrade
אחרי שמסיימים את הפעולה הזו, ממשיכים לשלבים הבאים.
- מתקינים את יחסי התלות.
$ wget https://apt.kitware.com/kitware-archive.sh $ sudo bash kitware-archive.sh $ sudo apt install --no-install-recommends git cmake ninja-build \ gperf ccache dfu-util device-tree-compiler python3-dev python3-pip \ python3-setuptools python3-tk python3-wheel xz-utils file make gcc \ gcc-multilib g++-multilib libsdl2-dev
$ cmake --version $ python3 --version $ dtc --version
- מתקינים את west.
$ pip3 install --user -U west $ echo 'export PATH=~/.local/bin:"$PATH"' >> ~/.bashrc $ source ~/.bashrc
~/.local/binנמצא במשתנה הסביבה$PATH. - מורידים את קוד המקור של Zephyr Project.
$ west init ~/zephyrproject $ cd ~/zephyrproject $ west update $ west blobs fetch hal_telink $ west zephyr-export
- מתקינים יחסי תלות נוספים של Python עבור Zephyr.
$ pip3 install --user -r ~/zephyrproject/zephyr/scripts/requirements.txt
- מגדירים את ערכת הכלים של Zephyr. מורידים את ערכת הכלים של Zephyr (בערך 1-2GB) לספרייה מקומית כדי לאפשר צריבת ROM (flash) לרוב הלוחות.
$ wget https://github.com/zephyrproject-rtos/sdk-ng/releases/download/v0.16.1/zephyr-sdk-0.16.1_linux-x86_64.tar.xz $ wget -O - https://github.com/zephyrproject-rtos/sdk-ng/releases/download/v0.16.1/sha256.sum | shasum --check --ignore-missing
$HOME/zephyr-sdk[-x.y.z] $HOME/.local/zephyr-sdk[-x.y.z] $HOME/.local/opt/zephyr-sdk[-x.y.z] $HOME/bin/zephyr-sdk[-x.y.z] /opt/zephyr-sdk[-x.y.z] /usr/zephyr-sdk[-x.y.z] /usr/local/zephyr-sdk[-x.y.z]
$ tar xvf zephyr-sdk-0.16.1_linux-x86_64.tar.xz $ cd zephyr-sdk-0.16.1 $ ./setup.sh -t riscv64-zephyr-elf -h -c
- בונים את הדוגמה Hello World. קודם צריך לוודא שההגדרה הרשמית של פרויקט Zephyr נכונה באמצעות הדוגמה Hello World, ואז להמשיך בהגדרת הפרויקט המותאם אישית.
$ cd ~/zephyrproject/zephyr $ west build -p auto -b tlsr9518adk80d samples/hello_world
zephyr.binבקטעbuild/zephyr directory. - מוסיפים את סקריפט הסביבה של Zephyr ל-
~/.bashrc. מריצים את הפקודות הבאות.$ echo "source ~/zephyrproject/zephyr/zephyr-env.sh" >> ~/.bashrc $ source ~/.bashrc
- מוסיפים את המאגר המרוחק Telink Zephyr. מורידים את מאגר Telink באופן מקומי כענף פיתוח ומעדכנים אותו.
$ cd ~/zephyrproject/zephyr $ git remote add telink-semi https://github.com/telink-semi/zephyr $ git fetch telink develop $ git checkout develop $ west update $ west blobs fetch hal_telink
מידע נוסף זמין במדריך למתחילים של Zephyr Doc.
הגדרת Telink LinuxBDT
מורידים את הכלי Telink LinuxBDT ומחלצים אותו לספרייה מקומית במחשב Linux, כמו ספריית הבית ~, כדי לאפשר צריבת ROM (flash) של קושחה בלוח הפיתוח B91.
$ cd ~ $ wget http://wiki.telink-semi.cn/tools_and_sdk/Tools/BDT/LinuxBDT.tar.bz2 $ tar -vxf LinuxBDT.tar.bz2
מחברים את ה-Burning Board למחשב Linux דרך ממשק ה-USB, ואז מזינים את הפקודות הבאות.
$ cd LinuxBDT $ sudo ./bdt lsusb -v Bus 002 Device 001: ID 1d6b:0003 xHCI Host Controller Bus 001 Device 003: ID 0bda:565a Integrated_Webcam_HD Bus 001 Device 023: ID 413c:301a Dell MS116 USB Optical Mouse Bus 001 Device 037: ID 248a:826a Telink Web Debugger v3.6 Bus 001 Device 001: ID 1d6b:0002 xHCI Host Controller
אם מופיעה ההודעה Telink Web Debugger v3.6, סימן שהמתכנת BDT התחבר בהצלחה למכונת Linux.
קומפילציה של קושחה
ב-Codelab הזה ניצור שני סוגים של קושחת OpenThread:
ot-cli-ftd,- ו
ot-rcp.
אלה שיטות הקימפול:
- מעבד משותף לרדיו (
ot-rcp)$ cd ~/zephyrproject $ rm -rf build_ot_coprocessor $ west build -b tlsr9518adk80d -d build_ot_coprocessor zephyr/samples/net/openthread/coprocessor -- -DDTC_OVERLAY_FILE="usb.overlay" -DOVERLAY_CONFIG=overlay-rcp-usb-telink.conf
- מכשיר Thread עם כל התכונות ושורת פקודה אינטראקטיבית (
ot-cli-ftd)$ cd ~/zephyrproject $ rm -rf build_ot_cli_ftd $ west build -b tlsr9518adk80d -d build_ot_cli_ftd zephyr/samples/net/openthread/cli -- -DOVERLAY_CONFIG=overlay-telink-fixed-mac.conf -DCONFIG_OPENTHREAD_FTD=y
העברת קושחה (Firmware Flash)
מחברים ל-Burning Board לוח פיתוח B91 באמצעות כבל USB, כמו שמוצג באיור שלמטה.
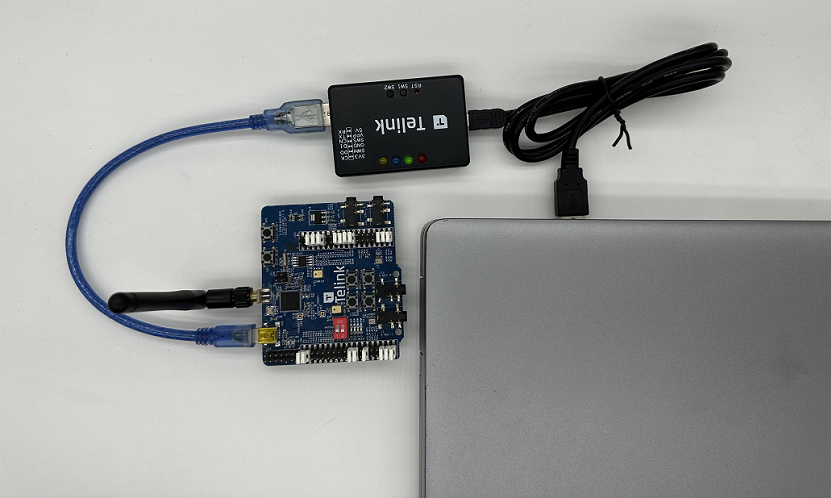
בשורת הפקודה, מריצים את הפקודות הבאות כדי לבצע צריבת קושחה (לדוגמה, שימוש בהבהוב של קושחת ot-cli-ftd).
$ cd ~/zephyrproject/build_ot_cli_ftd/zephyr $ cp zephyr.bin ~/LinuxBDT/bin/ot-cli-ftd.bin $ cd ~/LinuxBDT $ sudo ./bdt 9518 ac Activate OK! $ sudo ./bdt 9518 wf 0 -i bin/ot-cli-ftd.bin EraseSectorsize... Total Time: 2181 ms Flash writing... [100%][-] [##################################################] File Download to Flash at address 0x000000: 491700 bytes Total Time: 30087 ms
השיטה להפעלת Flash ב-ot-rcp זהה לשיטה להפעלת Flash ב-ot-cli-ftd. עם זאת, יש הבדלים בנתיבים ובשמות של הקושחה.
אחרי ההפעלה, מבחינים בין שני לוחות הפיתוח B91 על ידי סימון שלהם בהתאם. נותנים ללוח שמופיע לרגע עם ot-cli-ftd את התווית FTD Joiner וללוח שמופיע לרגע עם ot-rcp את התווית RCP.
4. הגדרת מסוף סדרתי למכשיר FTD Joiner
כמו שרואים בתמונה, מחברים את FTD Joiner ישירות ליציאת ה-USB של מכונת Linux.
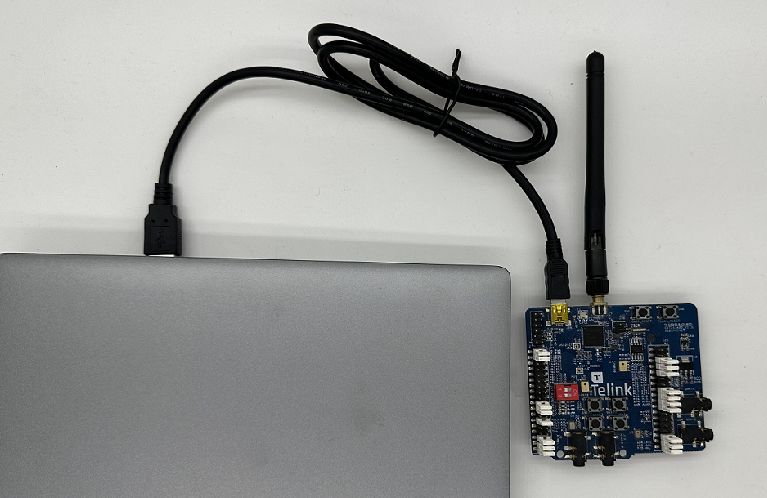
אחרי שמחברים את מכשיר ה-Joiner של FTD למכונת Linux, פותחים את PuTTY. לאחר מכן יוצרים טרמינל חדש, מגדירים את פרטי היציאה הטורית ופותחים את היציאה הטורית.
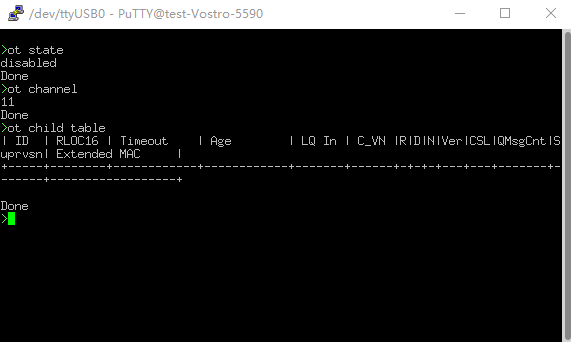
מאמרי עזרה על OpenThread CLI חשוב להוסיף את הקידומת ot לכל הפקודות.
דוגמאות:
> ot state disabled Done > ot channel 11 Done >
5. הגדרת Raspberry Pi כנתב גבול OpenThread
נתב גבולות OpenThread הוא מכשיר שמורכב משני חלקים עיקריים:
- Raspberry Pi מכיל את כל השירותים והקושחה שנדרשים כדי לפעול כנתב גבול (BR).
- RCP אחראי על התקשורת בפרוטוקול Thread.
מעבד משנה של רדיו (RCP)
כדי לצרוב את ot-rcp הקושחה, פועלים לפי אותם השלבים כמו בתהליך צריבת הקושחה ot-cli-ftd. מחברים את לוח הפיתוח B91 ליציאת USB ב-Raspberry Pi, כמו שמוצג באיור שלמטה.
Raspberry Pi
- מוודאים שתמונת מערכת ההפעלה Raspbian Bullseye Lite או Raspbian Bullseye עם Desktop נכתבו בצורה תקינה לכרטיס ה-SD.
- יש לכם אפשרות להתחבר ל-Raspberry Pi באמצעות SSH או לעבוד ישירות עם Raspbian Desktop. ב-codelab הזה נשתמש ב-SSH.
- לפני שממשיכים להתקנת OTBR Docker בשלב הבא, חשוב לעדכן קודם את המאגר המקומי ואת מנהל החבילות.
$ sudo apt-get update $ sudp apt-get upgrade
התקנת Docker
אם בשלב הקודם רק עדכנתם את המאגר המקומי ואת מנהל החבילות APT, אתם צריכים להפעיל מחדש את Raspberry Pi ואז לפתוח חלון טרמינל של SSH.
- מתקינים את Docker:
$ curl -sSL https://get.docker.com | sh
- כדי להעניק את ההרשאה כך שלא יהיה צורך להוסיף את
sudoלפני כל פקודה, צריך להוסיף את החשבון הנוכחי לקבוצת Docker.$ sudo usermod -aG docker $USER
- אם Docker לא הופעל, מפעילים אותו:
$ sudo dockerd
- סקריפטים של חומת האש של OTBR יוצרים כללים בתוך קונטיינר Docker. לפני כן, מריצים את הפקודה
modprobeכדי לטעון את מודול הליבה של iptables.$ sudo modprobe ip6table_filter
הגדרה והפעלה של Docker
ב-Codelab הזה, קובץ אימג' של Docker של OTBR נמשך ישירות מ-OpenThread Docker Hub. התמונה הזו נבדקה ואומתה על ידי צוות OpenThread.
- שליפת התמונה האחרונה:
$ docker pull openthread/otbr:latest
- בודקים את רשימת התמונות בקונטיינר Docker:
$ docker images REPOSITORY TAG IMAGE ID CREATED SIZE openthread/otbr latest db081f4de15f 6 days ago 766MB
- כדי לדעת מה שם היציאה הטורית של מכשיר ה-RCP, בודקים את
/dev. אם מופיעttyACM0, סימן שמכשיר ה-RCP מחובר בצורה תקינה.$ ls /dev/tty* ... /dev/ttyACM0 ...
- מריצים את OTBR Docker בפעם הראשונה ומפנים ליציאה הטורית של RCP (
ttyACM0). כדי להמשיך להשתמש ב-OTBR Docker הזה, משתמשים בפקודה docker start otbr.$ docker run --name "otbr" --sysctl "net.ipv6.conf.all.disable_ipv6=0 net.ipv4.conf.all.forwarding=1 net.ipv6.conf.all.forwarding=1" -p 8080:80 --dns=127.0.0.1 -it --volume /dev/ttyACM0:/dev/ttyACM0 --privileged openthread/otbr --radio-url spinel+hdlc+uart:///dev/ttyACM0
- פותחים חלון טרמינל חדש של SSH כדי לבדוק את הקישוריות בין Raspberry Pi לבין RCP.
$ docker exec -ti otbr sh -c "sudo ot-ctl" > state disabled Done
פקודות Docker אופציונליות:
- קבלת מידע על קונטיינר Docker שפועל:
$ docker ps -aq
- עוצרים את OTBR Docker:
$ docker stop otbr
- הסרת OTBR Docker:
$ docker rm otbr
- טעינה מחדש של OTBR Docker:
$ docker restart otbr
בשלב הזה, מכשיר FTD Joiner ו-OTBR מוכנים, ואפשר להמשיך לשלב הבא כדי ליצור את רשת Thread.
6. יצירת רשת Thread
יצירת רשת Thread ב-RCP
אנחנו משתמשים במעטפת ot-ctl ב-OTBR כדי ליצור רשת Thread. אם יצאתם מהמעטפת בקטע הקודם, מזינים את הפקודה הבאה כדי להפעיל אותה שוב בטרמינל SSH:
$ docker exec -ti otbr sh -c "sudo ot-ctl"
לאחר מכן, מזינים את הפקודות בסדר שצוין בטבלה, ומוודאים שבכל שלב מתקבלת התוצאה הצפויה לפני שממשיכים לשלב הבא.
אינדקס | פקודה | מבוא | תשובה צפויה | ||
1 |
| יוצרים מערך נתונים חדש של רשת אקראית. | סיום | ||
2 |
| ביצוע Commit למערך נתונים חדש במערך הנתונים התפעולי הפעיל באחסון לא נדיף. | סיום | ||
3 |
| פותחים את ממשק IPv6. | סיום | ||
4 |
| להפעיל את הפרוטוקול Thread ולהתחבר לרשת Thread. | סיום | ||
מחכים 10 שניות עד שממשק השרשור מופיע. | |||||
5 |
| בודקים את מצב המכשיר.אפשר להפעיל את הפקודה הזו כמה פעמים עד שהמכשיר הופך למוביל ועובר לשלב הבא. | מוביל | ||
6 |
| בודקים את מערך הנתונים המבצעי הפעיל המלא ורושמים את מפתח הרשת. | חותמת זמן פעילה: 1 | ||
מכשירים מסוג ot-cli-ftd יצטרפו לרשת Thread הזו באמצעות מפתח הרשת שנוצר באופן אקראי על ידי OTBR במהלך יצירת הרשת.
הוספה של FTD Joiner לפרוטוקול Thread באמצעות הפעלה מחוץ לפס
הקצאת הרשאות מחוץ לפס (Out-of-band commissioning) מתייחסת להעברה של פרטי הכניסה לרשת למכשירים שממתינים להצטרפות לרשת באמצעות שיטות לא אלחוטיות (לדוגמה, הזנה ידנית ב-OpenThread CLI). מזינים את הפקודות הבאות בסדר הזה במסוף הסדרתי כדי להצטרף ל-FTD.
אינדקס | פקודה | מבוא | תשובות צפויות | ||
1 |
| כדי שמכשיר יוכל להתחבר לרשת בפרוטוקול Thread, נדרש רק מפתח הרשת. | סיום | ||
2 |
| ביצוע Commit למערך נתונים חדש במערך הנתונים התפעולי הפעיל באחסון לא נדיף. | סיום | ||
3 |
| פותחים את ממשק IPv6. | סיום | ||
4 |
| להפעיל את הפרוטוקול Thread ולהתחבר לרשת Thread. | סיום | ||
ממתינים 20 שניות בזמן שהמכשיר מצטרף ומוגדר. | |||||
5 |
| בודקים את מצב המכשיר. | child/router | ||
טופולוגיה
מזינים פקודות כמו ipaddr, child table, router table בטרמינל SSH כדי לקבל תשובות כמו קטעי הקוד הבאים.
> ipaddr rloc fd8c:60bc:a98:c7ba:0:ff:fe00:b000 Done > child table | ID | RLOC16 | Timeout | Age | LQ In | C_VN |R|D|N|Ver|CSL|QMsgCnt|Suprvsn| Extended MAC | +-----+--------+------------+------------+-------+------+-+-+-+---+---+-------+-------+------------------+ | 1 | 0xb001 | 240 | 23 | 3 | 51 |1|1|1| 3| 0 | 0 | 129 | 82bc12fbe783468e | Done > router table | ID | RLOC16 | Next Hop | Path Cost | LQ In | LQ Out | Age | Extended MAC | Link | +----+--------+----------+-----------+-------+--------+-----+------------------+------+ | 44 | 0xb000 | 63 | 0 | 0 | 0 | 0 | 7ae354109d611f7e | 0 | Done ... > child table | ID | RLOC16 | Timeout | Age | LQ In | C_VN |R|D|N|Ver|CSL|QMsgCnt|Suprvsn| Extended MAC | +-----+--------+------------+------------+-------+------+-+-+-+---+---+-------+-------+------------------+ Done > router table | ID | RLOC16 | Next Hop | Path Cost | LQ In | LQ Out | Age | Extended MAC | Link | +----+--------+----------+-----------+-------+--------+-----+------------------+------+ | 33 | 0x8400 | 63 | 0 | 3 | 3 | 13 | e61487c1cda940a6 | 1 | | 44 | 0xb000 | 63 | 0 | 0 | 0 | 0 | 7ae354109d611f7e | 0 | Done
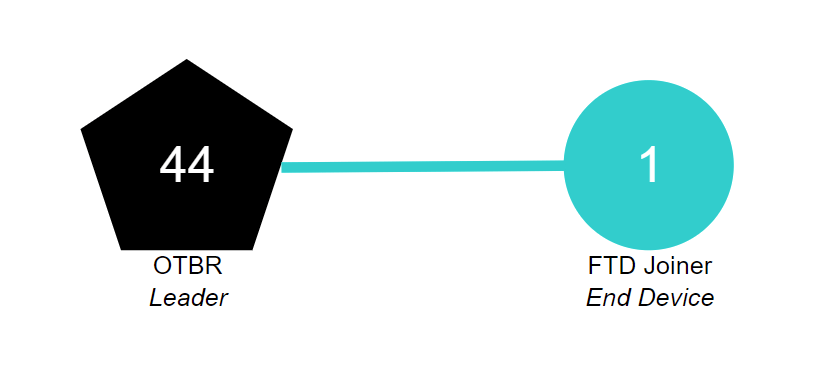
ה-RLOC16 של OTBR הוא 0xb000 וה-RLOC16 של FTD Joiner הוא 0xb001. אחרי שמקבלים את מזהה הנתב, מזהה ה-FTD של המצטרף RLOC16 הופך ל-0x8400. אפשר לראות שה-FTD Joiner שודרג מצאצא לנתב.
רשת ה-Thread הנוכחית מכילה שני צמתים, והטופולוגיה שלה מוצגת באיור שלמטה.
7. תקשורת בין מכשירים בפרוטוקול Thread
תקשורת ICMPv6
אנחנו משתמשים בפקודה ping כדי לבדוק אם מכשירי Thread באותה רשת יכולים לתקשר ביניהם. קודם כל, משתמשים בפקודה ipaddr כדי לקבל את RLOC של המכשיר.
> ipaddr fd8c:60bc:a98:c7ba:0:ff:fe00:fc11 fdbd:7274:649c:1:1d19:9613:f705:a5af fd8c:60bc:a98:c7ba:0:ff:fe00:fc10 fd8c:60bc:a98:c7ba:0:ff:fe00:fc38 fd8c:60bc:a98:c7ba:0:ff:fe00:fc00 fd8c:60bc:a98:c7ba:0:ff:fe00:b000 # Routing Locator (RLOC) fd8c:60bc:a98:c7ba:5249:34ab:26d1:aff6 fe80:0:0:0:78e3:5410:9d61:1f7e Done
מזינים את הפקודה הבאה במסוף הסדרתי של FTD Joiner כדי להריץ את פעולת הפינג.
> ot ping fd8c:60bc:a98:c7ba:0:ff:fe00:b000 16 bytes from fd8c:60bc:a98:c7ba:0:ff:fe00:b000: icmp_seq=1 hlim=64 time=19ms 1 packets transmitted, 1 packets received. Packet loss = 0.0%. Round-trip min/avg/max = 19/19.0/19 ms. Done
תגובת הפלט של היציאה הטורית מציינת שצד ה-OTBR קיבל את בקשת הפינג, וצד ה-FTD Joiner קיבל את תגובת הפינג שהוחזרה על ידי ה-OTBR. התקשורת בין שני המכשירים תקינה.
תקשורת UDP
שירותי האפליקציות שמסופקים על ידי OpenThread כוללים גם UDP. אפשר להשתמש ב-UDP API כדי להעביר מידע בין צמתים ברשת Thread, או להעביר מידע לרשתות חיצוניות דרך נתב הגבול. הסבר מפורט על OpenThread's UDP API מופיע במאמר OpenThread CLI - UDP Example. ב-codelab הזה נשתמש בחלק מממשקי ה-API כדי להעביר מידע בין OTBR ל-FTD Joiner.
קודם כול, צריך לקבל את ה-EID המקומי של רשת ה-Mesh של OTBR. הכתובת הזו היא גם אחת מכתובות ה-IPv6 של מכשיר Thread, ואפשר להשתמש בה כדי לגשת למכשירי Thread באותו חלק של רשת Thread.
> ipaddr mleid fd8c:60bc:a98:c7ba:5249:34ab:26d1:aff6 Done
מזינים את הפקודות הבאות בטרמינל SSH כדי להפעיל את OTBR UDP ולאגד את יציאת 1022 של המכשיר.
> udp open Done > udp bind :: 1022 Done
מזינים את הפקודות הבאות במסוף הטורי ומפעילים את ה-UDP של FTD Joiner. מבצעים binding של יציאת 1022 במכשיר, ואז שולחים הודעת hello באורך 5 בייט ל-OTBR.
> ot udp open Done > ot udp bind :: 1022 Done > ot udp send fd8c:60bc:a98:c7ba:5249:34ab:26d1:aff6 1022 hello Done
בטרמינל של SSH מוצג המידע הבא. ה-OTBR מקבל את ההודעה hello מה-FTD Joiner, כלומר תקשורת ה-UDP הצליחה.
> 5 bytes from fd8c:60bc:a98:c7ba:9386:63cf:19d7:5a61 1022 hello
8. מזל טוב
יצרתם רשת פשוטה עם פרוטוקול Thread ואימתתם את התקשורת בתוך הרשת הזו.
עכשיו אתם יודעים:
- איך יוצרים את סביבת הפיתוח Telink Zephyr ומשתמשים בה.
- איך לבנות את הקבצים הבינאריים
ot-cli-ftdו-ot-rcp, וגם לצרוב אותם ללוחות פיתוח Telink B91. - איך מגדירים Raspberry Pi 3B+ או גרסה מתקדמת יותר כנתב גבול OpenThread (OTBR) באמצעות Docker.
- איך יוצרים רשת Thread ב-OTBR.
- איך מוסיפים מכשירים לרשת Thread באמצעות הקצאת הרשאות מחוץ לפס.
- איך מאמתים את החיבור בין הצמתים ברשת Thread.
קריאה נוספת
באתר openthread.io וב-GitHub אפשר לקרוא על משאבים שונים של OpenThread, כולל:
- פלטפורמות נתמכות – כאן אפשר לראות את כל הפלטפורמות שתומכות ב-OpenThread
- Build OpenThread – פרטים נוספים על בנייה והגדרה של OpenThread
- Thread Primer – הסבר על כל המושגים שקשורים ל-Thread שמופיעים ב-Codelab הזה
מסמכי עזר: