
1. Introduzione

OpenThread rilasciato da Nest è un'implementazione open source del protocollo di rete Thread®. Nest ha rilasciato OpenThread per rendere la tecnologia utilizzata nei prodotti Nest ampiamente disponibile agli sviluppatori, in modo da accelerare lo sviluppo di prodotti per la casa connessa.
La specifica Thread definisce un protocollo di comunicazione wireless affidabile, sicuro e a basso consumo basato su IPv6 per le applicazioni domestiche. OpenThread implementa tutti i livelli di rete Thread, inclusi IPv6, 6LoWPAN, IEEE 802.15.4 con sicurezza MAC, Mesh Link Establishment e Mesh Routing.
In questo codelab, utilizzerai le API OpenThread per avviare una rete Thread, monitorare e reagire alle modifiche dei ruoli dei dispositivi e inviare messaggi UDP, nonché collegare queste azioni a pulsanti e LED su hardware reale.
Obiettivi didattici
- Come programmare i pulsanti e i LED sulle schede di sviluppo Nordic nRF52840
- Come utilizzare le API OpenThread comuni e la classe
otInstance - Come monitorare e reagire alle modifiche dello stato di OpenThread
- Come inviare messaggi UDP a tutti i dispositivi in una rete Thread
- Come modificare i Makefile
Che cosa ti serve
Hardware:
- 3 schede di sviluppo Nordic Semiconductor nRF52840
- 3 cavi da USB a micro USB per collegare le schede
- Un computer Linux con almeno 3 porte USB
Software:
- GNU Toolchain
- Strumenti a riga di comando Nordic nRF5x
- Software Segger J-Link
- OpenThread
- Git
Salvo quanto diversamente indicato, i contenuti di questo Codelab sono concessi in licenza ai sensi della licenza Creative Commons Attribution 3.0, mentre gli esempi di codice sono concessi in licenza ai sensi della licenza Apache 2.0.
2. Per iniziare
Completa il codelab sull'hardware
Prima di iniziare questo codelab, devi completare il codelab Crea una rete Thread con schede nRF52840 e OpenThread, che:
- Elenca tutto il software necessario per la creazione e il flashing
- Ti insegna a creare OpenThread e a eseguirlo sulle schede Nordic nRF52840
- Mostra le basi di una rete Thread
In questo codelab non sono descritte le impostazioni dell'ambiente necessarie per creare OpenThread e programmare le schede, ma solo le istruzioni di base per programmare le schede. Si presuppone che tu abbia già completato il codelab Crea una rete Thread.
Macchina Linux
Questo Codelab è stato progettato per utilizzare una macchina Linux basata su i386 o x86 per eseguire il flashing di tutte le schede di sviluppo Thread. Tutti i passaggi sono stati testati su Ubuntu 14.04.5 LTS (Trusty Tahr).
Schede Nordic Semiconductor nRF52840
Questo codelab utilizza tre schede nRF52840 PDK.
Installare software
Per creare e caricare OpenThread, devi installare SEGGER J-Link, gli strumenti a riga di comando nRF5x, ARM GNU Toolchain e vari pacchetti Linux. Se hai completato il Codelab Build a Thread Network come richiesto, avrai già installato tutto il necessario. In caso contrario, completa il Codelab prima di continuare per assicurarti di poter creare e caricare OpenThread sulle schede di sviluppo nRF52840.
3. Clona il repository
OpenThread include un codice dell'applicazione di esempio che puoi utilizzare come punto di partenza per questo codelab.
Clona il repository di esempi OpenThread Nordic nRF528xx e crea OpenThread:
$ git clone --recursive https://github.com/openthread/ot-nrf528xx $ cd ot-nrf528xx $ ./script/bootstrap
4. Nozioni di base sull'API OpenThread
Le API pubbliche di OpenThread si trovano all'indirizzo ./openthread/include/openthread nel repository OpenThread. Queste API forniscono l'accesso a una serie di funzionalità di OpenThread a livello di Thread e di piattaforma per l'utilizzo nelle tue applicazioni:
- Informazioni e controllo dell'istanza OpenThread
- Servizi applicativi come IPv6, UDP e CoAP
- Gestione delle credenziali di rete, insieme ai ruoli di Commissario e Joiner
- Gestione del router di confine
- Funzionalità avanzate come la supervisione dei bambini e il rilevamento di inceppamenti
Le informazioni di riferimento su tutte le API OpenThread sono disponibili all'indirizzo openthread.io/reference.
Utilizzo di un'API
Per utilizzare un'API, includi il relativo file di intestazione in uno dei file dell'applicazione. Poi chiama la funzione che ti interessa.
Ad esempio, l'app di esempio CLI inclusa in OpenThread utilizza le seguenti intestazioni API:
./openthread/examples/apps/cli/main.c
#include <openthread/config.h> #include <openthread/cli.h> #include <openthread/diag.h> #include <openthread/tasklet.h> #include <openthread/platform/logging.h>
L'istanza OpenThread
La struttura otInstance è qualcosa che utilizzerai spesso quando lavori con le API OpenThread. Una volta inizializzata, questa struttura rappresenta un'istanza statica della libreria OpenThread e consente all'utente di effettuare chiamate API OpenThread.
Ad esempio, l'istanza OpenThread viene inizializzata nella funzione main() dell'app di esempio dell'interfaccia a riga di comando:
./openthread/examples/apps/cli/main.c
int main(int argc, char *argv[])
{
otInstance *instance
...
#if OPENTHREAD_ENABLE_MULTIPLE_INSTANCES
// Call to query the buffer size
(void)otInstanceInit(NULL, &otInstanceBufferLength);
// Call to allocate the buffer
otInstanceBuffer = (uint8_t *)malloc(otInstanceBufferLength);
assert(otInstanceBuffer);
// Initialize OpenThread with the buffer
instance = otInstanceInit(otInstanceBuffer, &otInstanceBufferLength);
#else
instance = otInstanceInitSingle();
#endif
...
return 0;
}
Funzioni specifiche della piattaforma
Se vuoi aggiungere funzioni specifiche della piattaforma a una delle applicazioni di esempio incluse in OpenThread, dichiarale prima nell'intestazione ./openthread/examples/platforms/openthread-system.h, utilizzando lo spazio dei nomi otSys per tutte le funzioni. e poi implementali in un file sorgente specifico della piattaforma. In questo modo, puoi utilizzare le stesse intestazioni di funzione per altre piattaforme di esempio.
Ad esempio, le funzioni GPIO che utilizzeremo per collegarci ai pulsanti e ai LED di nRF52840 devono essere dichiarate in openthread-system.h.
Apri il file ./openthread/examples/platforms/openthread-system.h nell'editor di testo che preferisci.
./openthread/examples/platforms/openthread-system.h
AZIONE: aggiungi dichiarazioni di funzioni GPIO specifiche della piattaforma.
Aggiungi queste dichiarazioni di funzione dopo #include per l'intestazione openthread/instance.h:
/** * Init LED module. * */ void otSysLedInit(void); void otSysLedSet(uint8_t aLed, bool aOn); void otSysLedToggle(uint8_t aLed); /** * A callback will be called when GPIO interrupts occur. * */ typedef void (*otSysButtonCallback)(otInstance *aInstance); void otSysButtonInit(otSysButtonCallback aCallback); void otSysButtonProcess(otInstance *aInstance);
Li implementeremo nel passaggio successivo.
Tieni presente che la dichiarazione della funzione otSysButtonProcess utilizza un otInstance. In questo modo, l'applicazione può accedere alle informazioni sull'istanza OpenThread quando viene premuto un pulsante, se necessario. Tutto dipende dalle esigenze della tua applicazione. Se non ti serve nell'implementazione della funzione, puoi utilizzare la macro OT_UNUSED_VARIABLE dell'API OpenThread per eliminare gli errori di compilazione relativi alle variabili inutilizzate per alcune toolchain. Vedremo alcuni esempi più avanti.
5. Implementare l'astrazione della piattaforma GPIO
Nel passaggio precedente, abbiamo esaminato le dichiarazioni di funzioni specifiche della piattaforma in ./openthread/examples/platforms/openthread-system.h che possono essere utilizzate per GPIO. Per accedere ai pulsanti e ai LED sulle schede di sviluppo nRF52840, devi implementare queste funzioni per la piattaforma nRF52840. In questo codice, aggiungerai funzioni che:
- Inizializza i pin e le modalità GPIO
- Controllare la tensione su un pin
- Abilita gli interrupt GPIO e registra un callback
Nella directory ./src/src, crea un nuovo file denominato gpio.c. In questo nuovo file, aggiungi i seguenti contenuti.
./src/src/gpio.c (new file)
AZIONE: aggiungi definizioni.
Queste definizioni fungono da astrazioni tra i valori e le variabili specifici di nRF52840 utilizzati a livello di applicazione OpenThread.
/** * @file * This file implements the system abstraction for GPIO and GPIOTE. * */ #define BUTTON_GPIO_PORT 0x50000300UL #define BUTTON_PIN 11 // button #1 #define GPIO_LOGIC_HI 0 #define GPIO_LOGIC_LOW 1 #define LED_GPIO_PORT 0x50000300UL #define LED_1_PIN 13 // turn on to indicate leader role #define LED_2_PIN 14 // turn on to indicate router role #define LED_3_PIN 15 // turn on to indicate child role #define LED_4_PIN 16 // turn on to indicate UDP receive
Per ulteriori informazioni sui pulsanti e sui LED di nRF52840, consulta il Nordic Semiconductor Infocenter.
AZIONE: aggiungi intestazioni incluse.
Successivamente, aggiungi le inclusioni di intestazione necessarie per la funzionalità GPIO.
/* Header for the functions defined here */ #include "openthread-system.h" #include <string.h> /* Header to access an OpenThread instance */ #include <openthread/instance.h> /* Headers for lower-level nRF52840 functions */ #include "platform-nrf5.h" #include "hal/nrf_gpio.h" #include "hal/nrf_gpiote.h" #include "nrfx/drivers/include/nrfx_gpiote.h"
AZIONE: aggiungi le funzioni di callback e interruzione per il pulsante 1.
Aggiungi questo codice. La funzione in_pin1_handler è il callback registrato quando viene inizializzata la funzionalità di pressione del pulsante (più avanti in questo file).
Nota come questo callback utilizzi la macro OT_UNUSED_VARIABLE, poiché le variabili passate a in_pin1_handler non vengono effettivamente utilizzate nella funzione.
/* Declaring callback function for button 1. */
static otSysButtonCallback sButtonHandler;
static bool sButtonPressed;
/**
* @brief Function to receive interrupt and call back function
* set by the application for button 1.
*
*/
static void in_pin1_handler(uint32_t pin, nrf_gpiote_polarity_t action)
{
OT_UNUSED_VARIABLE(pin);
OT_UNUSED_VARIABLE(action);
sButtonPressed = true;
}
AZIONE: aggiungi una funzione per configurare i LED.
Aggiungi questo codice per configurare la modalità e lo stato di tutti i LED durante l'inizializzazione.
/**
* @brief Function for configuring: PIN_IN pin for input, PIN_OUT pin for output,
* and configures GPIOTE to give an interrupt on pin change.
*/
void otSysLedInit(void)
{
/* Configure GPIO mode: output */
nrf_gpio_cfg_output(LED_1_PIN);
nrf_gpio_cfg_output(LED_2_PIN);
nrf_gpio_cfg_output(LED_3_PIN);
nrf_gpio_cfg_output(LED_4_PIN);
/* Clear all output first */
nrf_gpio_pin_write(LED_1_PIN, GPIO_LOGIC_LOW);
nrf_gpio_pin_write(LED_2_PIN, GPIO_LOGIC_LOW);
nrf_gpio_pin_write(LED_3_PIN, GPIO_LOGIC_LOW);
nrf_gpio_pin_write(LED_4_PIN, GPIO_LOGIC_LOW);
/* Initialize gpiote for button(s) input.
Button event handlers are set in the application (main.c) */
ret_code_t err_code;
err_code = nrfx_gpiote_init();
APP_ERROR_CHECK(err_code);
}
AZIONE: aggiungi una funzione per impostare la modalità di un LED.
Questa funzione verrà utilizzata quando il ruolo del dispositivo cambia.
/**
* @brief Function to set the mode of an LED.
*/
void otSysLedSet(uint8_t aLed, bool aOn)
{
switch (aLed)
{
case 1:
nrf_gpio_pin_write(LED_1_PIN, (aOn == GPIO_LOGIC_HI));
break;
case 2:
nrf_gpio_pin_write(LED_2_PIN, (aOn == GPIO_LOGIC_HI));
break;
case 3:
nrf_gpio_pin_write(LED_3_PIN, (aOn == GPIO_LOGIC_HI));
break;
case 4:
nrf_gpio_pin_write(LED_4_PIN, (aOn == GPIO_LOGIC_HI));
break;
}
}
AZIONE: aggiungi una funzione per attivare/disattivare la modalità di un LED.
Questa funzione verrà utilizzata per attivare/disattivare il LED4 quando il dispositivo riceve un messaggio UDP multicast.
/**
* @brief Function to toggle the mode of an LED.
*/
void otSysLedToggle(uint8_t aLed)
{
switch (aLed)
{
case 1:
nrf_gpio_pin_toggle(LED_1_PIN);
break;
case 2:
nrf_gpio_pin_toggle(LED_2_PIN);
break;
case 3:
nrf_gpio_pin_toggle(LED_3_PIN);
break;
case 4:
nrf_gpio_pin_toggle(LED_4_PIN);
break;
}
}
AZIONE: aggiungi funzioni per inizializzare ed elaborare le pressioni dei pulsanti.
La prima funzione inizializza la scheda per la pressione di un pulsante, mentre la seconda invia il messaggio UDP multicast quando viene premuto il pulsante 1.
/**
* @brief Function to initialize the button.
*/
void otSysButtonInit(otSysButtonCallback aCallback)
{
nrfx_gpiote_in_config_t in_config = NRFX_GPIOTE_CONFIG_IN_SENSE_LOTOHI(true);
in_config.pull = NRF_GPIO_PIN_PULLUP;
ret_code_t err_code;
err_code = nrfx_gpiote_in_init(BUTTON_PIN, &in_config, in_pin1_handler);
APP_ERROR_CHECK(err_code);
sButtonHandler = aCallback;
sButtonPressed = false;
nrfx_gpiote_in_event_enable(BUTTON_PIN, true);
}
void otSysButtonProcess(otInstance *aInstance)
{
if (sButtonPressed)
{
sButtonPressed = false;
sButtonHandler(aInstance);
}
}
AZIONE: salva e chiudi il file gpio.c.
6. API: reagire alle modifiche del ruolo del dispositivo
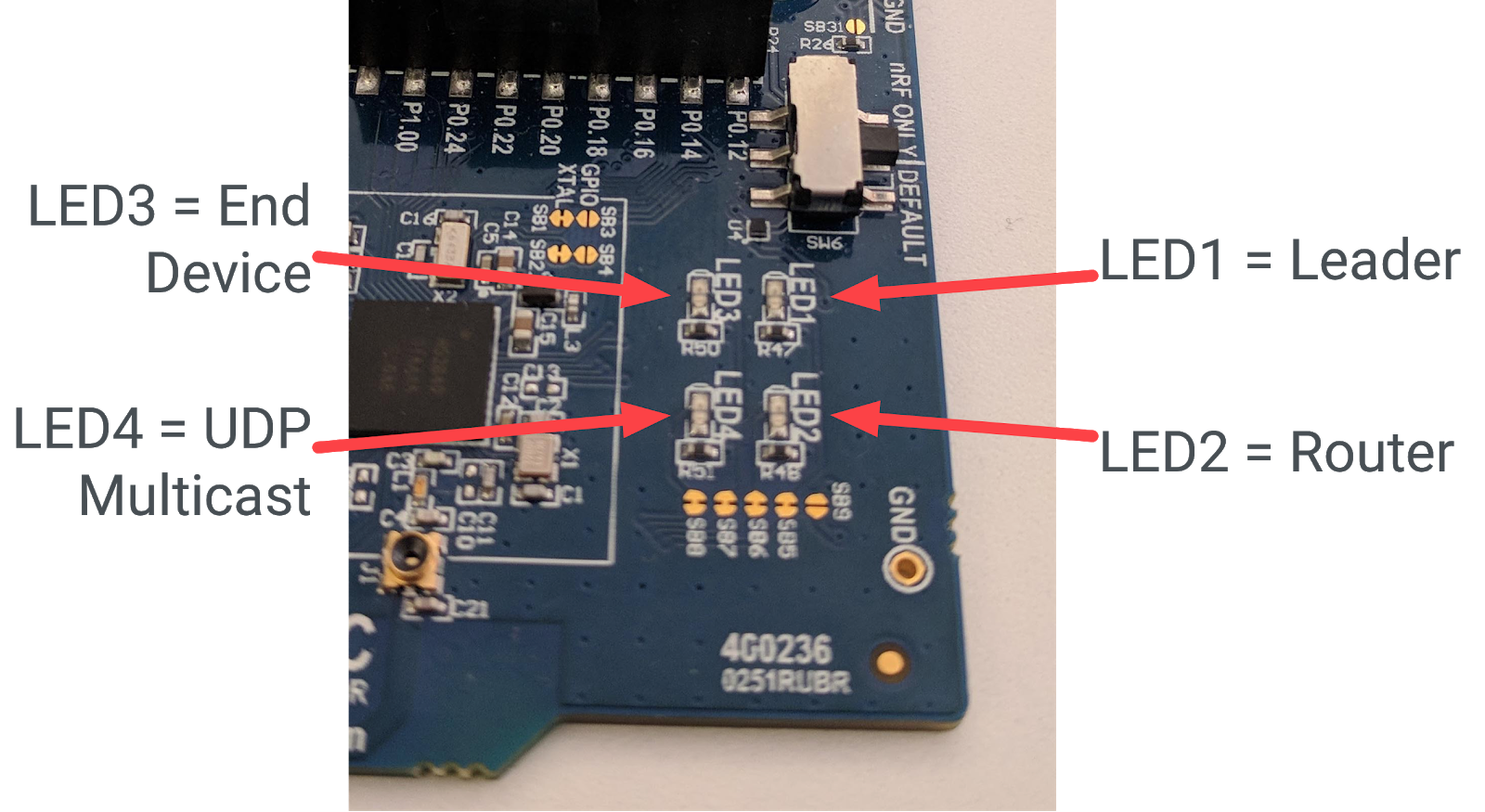
Nella nostra applicazione, vogliamo che si accendano LED diversi a seconda del ruolo del dispositivo. Monitoriamo i seguenti ruoli: Leader, Router, Dispositivo finale. Possiamo assegnarli ai LED in questo modo:
- LED1 = Leader
- LED2 = Router
- LED3 = Dispositivo finale
Per attivare questa funzionalità, l'applicazione deve sapere quando il ruolo del dispositivo è cambiato e come accendere il LED corretto in risposta. Utilizzeremo l'istanza OpenThread per la prima parte e l'astrazione della piattaforma GPIO per la seconda.
Apri il file ./openthread/examples/apps/cli/main.c nell'editor di testo che preferisci.
./openthread/examples/apps/cli/main.c
AZIONE: aggiungi intestazioni incluse.
Nella sezione includes del file main.c, aggiungi i file di intestazione API necessari per la funzionalità di modifica del ruolo.
#include <openthread/instance.h> #include <openthread/thread.h> #include <openthread/thread_ftd.h>
AZIONE: aggiungi la dichiarazione della funzione del gestore per la modifica dello stato dell'istanza OpenThread.
Aggiungi questa dichiarazione a main.c, dopo le inclusioni dell'intestazione e prima di qualsiasi istruzione #if. Questa funzione verrà definita dopo l'applicazione principale.
void handleNetifStateChanged(uint32_t aFlags, void *aContext);
AZIONE: aggiungi una registrazione di callback per la funzione di gestione della modifica dello stato.
In main.c, aggiungi questa funzione alla funzione main() dopo la chiamata otAppCliInit. Questa registrazione di callback indica a OpenThread di chiamare la funzione handleNetifStateChange ogni volta che cambia lo stato dell'istanza OpenThread.
/* Register Thread state change handler */ otSetStateChangedCallback(instance, handleNetifStateChanged, instance);
AZIONE: aggiungi l'implementazione della modifica dello stato.
In main.c, dopo la funzione main(), implementa la funzione handleNetifStateChanged. Questa funzione controlla il flag OT_CHANGED_THREAD_ROLE dell'istanza OpenThread e, se è cambiato, accende/spegne i LED in base alle necessità.
void handleNetifStateChanged(uint32_t aFlags, void *aContext)
{
if ((aFlags & OT_CHANGED_THREAD_ROLE) != 0)
{
otDeviceRole changedRole = otThreadGetDeviceRole(aContext);
switch (changedRole)
{
case OT_DEVICE_ROLE_LEADER:
otSysLedSet(1, true);
otSysLedSet(2, false);
otSysLedSet(3, false);
break;
case OT_DEVICE_ROLE_ROUTER:
otSysLedSet(1, false);
otSysLedSet(2, true);
otSysLedSet(3, false);
break;
case OT_DEVICE_ROLE_CHILD:
otSysLedSet(1, false);
otSysLedSet(2, false);
otSysLedSet(3, true);
break;
case OT_DEVICE_ROLE_DETACHED:
case OT_DEVICE_ROLE_DISABLED:
/* Clear LED4 if Thread is not enabled. */
otSysLedSet(4, false);
break;
}
}
}
7. API: utilizza il multicast per accendere un LED
Nella nostra applicazione, vogliamo anche inviare messaggi UDP a tutti gli altri dispositivi della rete quando viene premuto Button1 su una scheda. Per confermare la ricezione del messaggio, attiveremo il LED4 sulle altre schede in risposta.
Per attivare questa funzionalità, l'applicazione deve:
- Inizializzare una connessione UDP all'avvio
- Essere in grado di inviare un messaggio UDP all'indirizzo multicast locale della mesh
- Gestire i messaggi UDP in entrata
- Attiva/disattiva il LED4 in risposta ai messaggi UDP in arrivo
Apri il file ./openthread/examples/apps/cli/main.c nell'editor di testo che preferisci.
./openthread/examples/apps/cli/main.c
AZIONE: aggiungi intestazioni incluse.
Nella sezione include nella parte superiore del file main.c, aggiungi i file di intestazione API necessari per la funzionalità UDP multicast.
#include <string.h> #include <openthread/message.h> #include <openthread/udp.h> #include "utils/code_utils.h"
L'intestazione code_utils.h viene utilizzata per le macro otEXPECT e otEXPECT_ACTION che convalidano le condizioni di runtime e gestiscono gli errori in modo controllato.
AZIONE: aggiungi definizioni e costanti:
Nel file main.c, dopo la sezione includes e prima di qualsiasi istruzione #if, aggiungi costanti e definizioni specifiche per UDP:
#define UDP_PORT 1212 static const char UDP_DEST_ADDR[] = "ff03::1"; static const char UDP_PAYLOAD[] = "Hello OpenThread World!";
ff03::1 è l'indirizzo multicast locale della mesh. Tutti i messaggi inviati a questo indirizzo verranno inviati a tutti i dispositivi Full Thread della rete. Per saperne di più sul supporto multicast in OpenThread, consulta Multicast su openthread.io.
AZIONE: aggiungi dichiarazioni di funzione.
Nel file main.c, dopo la definizione di otTaskletsSignalPending e prima della funzione main(), aggiungi funzioni specifiche per UDP, nonché una variabile statica per rappresentare un socket UDP:
static void initUdp(otInstance *aInstance);
static void sendUdp(otInstance *aInstance);
static void handleButtonInterrupt(otInstance *aInstance);
void handleUdpReceive(void *aContext, otMessage *aMessage,
const otMessageInfo *aMessageInfo);
static otUdpSocket sUdpSocket;
AZIONE: aggiungi chiamate per inizializzare i LED e il pulsante GPIO.
In main.c, aggiungi queste chiamate di funzione alla funzione main() dopo la chiamata otSetStateChangedCallback. Queste funzioni inizializzano i pin GPIO e GPIOTE e impostano un gestore di pulsanti per gestire gli eventi di pressione dei pulsanti.
/* init GPIO LEDs and button */ otSysLedInit(); otSysButtonInit(handleButtonInterrupt);
AZIONE: aggiungi la chiamata di inizializzazione UDP.
In main.c, aggiungi questa funzione alla funzione main() dopo la chiamata otSysButtonInit appena aggiunta:
initUdp(instance);
Questa chiamata garantisce l'inizializzazione di un socket UDP all'avvio dell'applicazione. Senza questa impostazione, il dispositivo non può inviare o ricevere messaggi UDP.
AZIONE: aggiungi una chiamata per elaborare l'evento del pulsante GPIO.
In main.c, aggiungi questa chiamata di funzione alla funzione main() dopo la chiamata otSysProcessDrivers, nel ciclo while. Questa funzione, dichiarata in gpio.c, controlla se il pulsante è stato premuto e, in caso affermativo, chiama il gestore (handleButtonInterrupt) impostato nel passaggio precedente.
otSysButtonProcess(instance);
AZIONE: implementa il gestore di interruzione del pulsante.
In main.c, aggiungi l'implementazione della funzione handleButtonInterrupt dopo la funzione handleNetifStateChanged che hai aggiunto nel passaggio precedente:
/**
* Function to handle button push event
*/
void handleButtonInterrupt(otInstance *aInstance)
{
sendUdp(aInstance);
}
AZIONE: implementa l'inizializzazione UDP.
In main.c, aggiungi l'implementazione della funzione initUdp dopo la funzione handleButtonInterrupt che hai appena aggiunto:
/**
* Initialize UDP socket
*/
void initUdp(otInstance *aInstance)
{
otSockAddr listenSockAddr;
memset(&sUdpSocket, 0, sizeof(sUdpSocket));
memset(&listenSockAddr, 0, sizeof(listenSockAddr));
listenSockAddr.mPort = UDP_PORT;
otUdpOpen(aInstance, &sUdpSocket, handleUdpReceive, aInstance);
otUdpBind(aInstance, &sUdpSocket, &listenSockAddr, OT_NETIF_THREAD);
}
UDP_PORT è la porta definita in precedenza (1212). La funzione otUdpOpen apre il socket e registra una funzione di callback (handleUdpReceive) per quando viene ricevuto un messaggio UDP. otUdpBind associa il socket all'interfaccia di rete Thread passando OT_NETIF_THREAD. Per altre opzioni di interfaccia di rete, consulta l'enumerazione otNetifIdentifier nel riferimento API UDP.
AZIONE: implementa la messaggistica UDP.
In main.c, aggiungi l'implementazione della funzione sendUdp dopo la funzione initUdp che hai appena aggiunto:
/**
* Send a UDP datagram
*/
void sendUdp(otInstance *aInstance)
{
otError error = OT_ERROR_NONE;
otMessage * message;
otMessageInfo messageInfo;
otIp6Address destinationAddr;
memset(&messageInfo, 0, sizeof(messageInfo));
otIp6AddressFromString(UDP_DEST_ADDR, &destinationAddr);
messageInfo.mPeerAddr = destinationAddr;
messageInfo.mPeerPort = UDP_PORT;
message = otUdpNewMessage(aInstance, NULL);
otEXPECT_ACTION(message != NULL, error = OT_ERROR_NO_BUFS);
error = otMessageAppend(message, UDP_PAYLOAD, sizeof(UDP_PAYLOAD));
otEXPECT(error == OT_ERROR_NONE);
error = otUdpSend(aInstance, &sUdpSocket, message, &messageInfo);
exit:
if (error != OT_ERROR_NONE && message != NULL)
{
otMessageFree(message);
}
}
Prendi nota delle macro otEXPECT e otEXPECT_ACTION. Questi assicurano che il messaggio UDP sia valido e allocato correttamente nel buffer; in caso contrario, la funzione gestisce gli errori in modo controllato passando al blocco exit, dove libera il buffer.
Per saperne di più sulle funzioni utilizzate per inizializzare UDP, consulta i riferimenti IPv6 e UDP su openthread.io.
AZIONE: implementa la gestione dei messaggi UDP.
In main.c, aggiungi l'implementazione della funzione handleUdpReceive dopo la funzione sendUdp che hai appena aggiunto. Questa funzione attiva/disattiva semplicemente il LED4.
/**
* Function to handle UDP datagrams received on the listening socket
*/
void handleUdpReceive(void *aContext, otMessage *aMessage,
const otMessageInfo *aMessageInfo)
{
OT_UNUSED_VARIABLE(aContext);
OT_UNUSED_VARIABLE(aMessage);
OT_UNUSED_VARIABLE(aMessageInfo);
otSysLedToggle(4);
}
8. API: configura la rete Thread
Per facilitare la dimostrazione, vogliamo che i nostri dispositivi avviino immediatamente Thread e si uniscano in una rete quando vengono accesi. A questo scopo, useremo la struttura otOperationalDataset. Questa struttura contiene tutti i parametri necessari per trasmettere le credenziali di rete Thread a un dispositivo.
L'utilizzo di questa struttura sostituirà i valori predefiniti della rete integrati in OpenThread, per rendere la nostra applicazione più sicura e limitare i nodi Thread nella nostra rete solo a quelli che eseguono l'applicazione.
Apri di nuovo il file ./openthread/examples/apps/cli/main.c nell'editor di testo che preferisci.
./openthread/examples/apps/cli/main.c
AZIONE: aggiungi l'inclusione dell'intestazione.
Nella sezione includes nella parte superiore del file main.c, aggiungi il file di intestazione dell'API che ti servirà per configurare la rete Thread:
#include <openthread/dataset_ftd.h>
AZIONE: aggiungi la dichiarazione di funzione per impostare la configurazione di rete.
Aggiungi questa dichiarazione a main.c, dopo le inclusioni dell'intestazione e prima di qualsiasi istruzione #if. Questa funzione verrà definita dopo la funzione principale dell'applicazione.
static void setNetworkConfiguration(otInstance *aInstance);
AZIONE: aggiungi la chiamata di configurazione di rete.
In main.c, aggiungi questa chiamata di funzione alla funzione main() dopo la chiamata otSetStateChangedCallback. Questa funzione configura il set di dati della rete Thread.
/* Override default network credentials */ setNetworkConfiguration(instance);
AZIONE: aggiungi chiamate per attivare lo stack e l'interfaccia di rete Thread.
In main.c, aggiungi queste chiamate di funzione alla funzione main() dopo la chiamata otSysButtonInit.
/* Start the Thread network interface (CLI cmd > ifconfig up) */ otIp6SetEnabled(instance, true); /* Start the Thread stack (CLI cmd > thread start) */ otThreadSetEnabled(instance, true);
AZIONE: implementa la configurazione della rete Thread.
In main.c, aggiungi l'implementazione della funzione setNetworkConfiguration dopo la funzione main():
/**
* Override default network settings, such as panid, so the devices can join a
network
*/
void setNetworkConfiguration(otInstance *aInstance)
{
static char aNetworkName[] = "OTCodelab";
otOperationalDataset aDataset;
memset(&aDataset, 0, sizeof(otOperationalDataset));
/*
* Fields that can be configured in otOperationDataset to override defaults:
* Network Name, Mesh Local Prefix, Extended PAN ID, PAN ID, Delay Timer,
* Channel, Channel Mask Page 0, Network Key, PSKc, Security Policy
*/
aDataset.mActiveTimestamp.mSeconds = 1;
aDataset.mActiveTimestamp.mTicks = 0;
aDataset.mActiveTimestamp.mAuthoritative = false;
aDataset.mComponents.mIsActiveTimestampPresent = true;
/* Set Channel to 15 */
aDataset.mChannel = 15;
aDataset.mComponents.mIsChannelPresent = true;
/* Set Pan ID to 2222 */
aDataset.mPanId = (otPanId)0x2222;
aDataset.mComponents.mIsPanIdPresent = true;
/* Set Extended Pan ID to C0DE1AB5C0DE1AB5 */
uint8_t extPanId[OT_EXT_PAN_ID_SIZE] = {0xC0, 0xDE, 0x1A, 0xB5, 0xC0, 0xDE, 0x1A, 0xB5};
memcpy(aDataset.mExtendedPanId.m8, extPanId, sizeof(aDataset.mExtendedPanId));
aDataset.mComponents.mIsExtendedPanIdPresent = true;
/* Set network key to 1234C0DE1AB51234C0DE1AB51234C0DE */
uint8_t key[OT_NETWORK_KEY_SIZE] = {0x12, 0x34, 0xC0, 0xDE, 0x1A, 0xB5, 0x12, 0x34, 0xC0, 0xDE, 0x1A, 0xB5, 0x12, 0x34, 0xC0, 0xDE};
memcpy(aDataset.mNetworkKey.m8, key, sizeof(aDataset.mNetworkKey));
aDataset.mComponents.mIsNetworkKeyPresent = true;
/* Set Network Name to OTCodelab */
size_t length = strlen(aNetworkName);
assert(length <= OT_NETWORK_NAME_MAX_SIZE);
memcpy(aDataset.mNetworkName.m8, aNetworkName, length);
aDataset.mComponents.mIsNetworkNamePresent = true;
otDatasetSetActive(aInstance, &aDataset);
/* Set the router selection jitter to override the 2 minute default.
CLI cmd > routerselectionjitter 20
Warning: For demo purposes only - not to be used in a real product */
uint8_t jitterValue = 20;
otThreadSetRouterSelectionJitter(aInstance, jitterValue);
}
Come descritto in dettaglio nella funzione, i parametri di rete Thread che utilizziamo per questa applicazione sono:
- Channel = 15
- PAN ID = 0x2222
- ID PAN esteso = C0DE1AB5C0DE1AB5
- Network Key = 1234C0DE1AB51234C0DE1AB51234C0DE
- Network Name = OTCodelab
Inoltre, è qui che riduciamo il jitter di selezione del router, in modo che i nostri dispositivi cambino ruolo più rapidamente a scopo dimostrativo. Tieni presente che questa operazione viene eseguita solo se il nodo è un FTD (Full Thread Device). Scopri di più nel passaggio successivo.
9. API: funzioni limitate
Alcune API di OpenThread modificano impostazioni che devono essere modificate solo a scopo dimostrativo o di test. Queste API non devono essere utilizzate in un deployment di produzione di un'applicazione che utilizza OpenThread.
Ad esempio, la funzione otThreadSetRouterSelectionJitter regola il tempo (in secondi) necessario a un dispositivo finale per promuoversi a router. Il valore predefinito è 120, come specificato nella specifica del thread. Per facilità d'uso in questo Codelab, lo modificheremo in 20, in modo da non dover attendere molto tempo prima che un nodo Thread cambi ruolo.
Nota: i dispositivi MTD non diventano router e il supporto per una funzione come otThreadSetRouterSelectionJitter non è incluso in una build MTD. In seguito dobbiamo specificare l'opzione CMake -DOT_MTD=OFF, altrimenti si verificherà un errore di compilazione.
Puoi verificarlo esaminando la definizione della funzione otThreadSetRouterSelectionJitter, contenuta in una direttiva del preprocessor OPENTHREAD_FTD:
./openthread/src/core/api/thread_ftd_api.cpp
#if OPENTHREAD_FTD
#include <openthread/thread_ftd.h>
...
void otThreadSetRouterSelectionJitter(otInstance *aInstance, uint8_t aRouterJitter)
{
Instance &instance = *static_cast<Instance *>(aInstance);
instance.GetThreadNetif().GetMle().SetRouterSelectionJitter(aRouterJitter);
}
...
#endif // OPENTHREAD_FTD
10. Aggiornamenti di CMake
Prima di creare l'applicazione, sono necessari alcuni aggiornamenti minori per tre file CMake. che vengono utilizzati dal sistema di compilazione per compilare e collegare l'applicazione.
./third_party/NordicSemiconductor/CMakeLists.txt
Ora aggiungi alcuni flag a NordicSemiconductor CMakeLists.txt per assicurarti che le funzioni GPIO siano definite nell'applicazione.
AZIONE: aggiungi i flag al file CMakeLists.txt.
Apri ./third_party/NordicSemiconductor/CMakeLists.txt nell'editor di testo che preferisci e aggiungi le seguenti righe nella sezione COMMON_FLAG.
...
set(COMMON_FLAG
-DSPIS_ENABLED=1
-DSPIS0_ENABLED=1
-DNRFX_SPIS_ENABLED=1
-DNRFX_SPIS0_ENABLED=1
...
# Defined in ./third_party/NordicSemiconductor/nrfx/templates/nRF52840/nrfx_config.h
-DGPIOTE_ENABLED=1
-DGPIOTE_CONFIG_IRQ_PRIORITY=7
-DGPIOTE_CONFIG_NUM_OF_LOW_POWER_EVENTS=1
)
...
./src/CMakeLists.txt
Modifica il file ./src/CMakeLists.txt per aggiungere il nuovo file di origine gpio.c:
AZIONE: aggiungi l'origine gpio al file ./src/CMakeLists.txt.
Apri ./src/CMakeLists.txt nel tuo editor di testo preferito e aggiungi il file alla sezione NRF_COMM_SOURCES.
... set(NRF_COMM_SOURCES ... src/gpio.c ... ) ...
./third_party/NordicSemiconductor/CMakeLists.txt
Infine, aggiungi il file del driver nrfx_gpiote.c al file CMakeLists.txt di NordicSemiconductor, in modo che venga incluso nella build della libreria dei driver Nordic.
AZIONE: aggiungi il driver GPIO al file NordicSemiconductor CMakeLists.txt.
Apri ./third_party/NordicSemiconductor/CMakeLists.txt nel tuo editor di testo preferito e aggiungi il file alla sezione COMMON_SOURCES.
... set(COMMON_SOURCES ... nrfx/drivers/src/nrfx_gpiote.c ... ) ...
11. Configurare i dispositivi
Una volta completati tutti gli aggiornamenti del codice, puoi creare e caricare l'applicazione su tutte e tre le schede di sviluppo Nordic nRF52840. Ogni dispositivo funzionerà come un dispositivo Thread completo (FTD).
Compilare OpenThread
Crea i file binari FTD di OpenThread per la piattaforma nRF52840.
$ cd ~/ot-nrf528xx $ ./script/build nrf52840 UART_trans -DOT_MTD=OFF -DOT_APP_RCP=OFF -DOT_RCP=OFF
Vai alla directory con il binario della CLI OpenThread FTD e convertilo in formato esadecimale con ARM Embedded Toolchain:
$ cd build/bin $ arm-none-eabi-objcopy -O ihex ot-cli-ftd ot-cli-ftd.hex
Mostrare i cartelli
Carica il file ot-cli-ftd.hex su ogni scheda nRF52840.
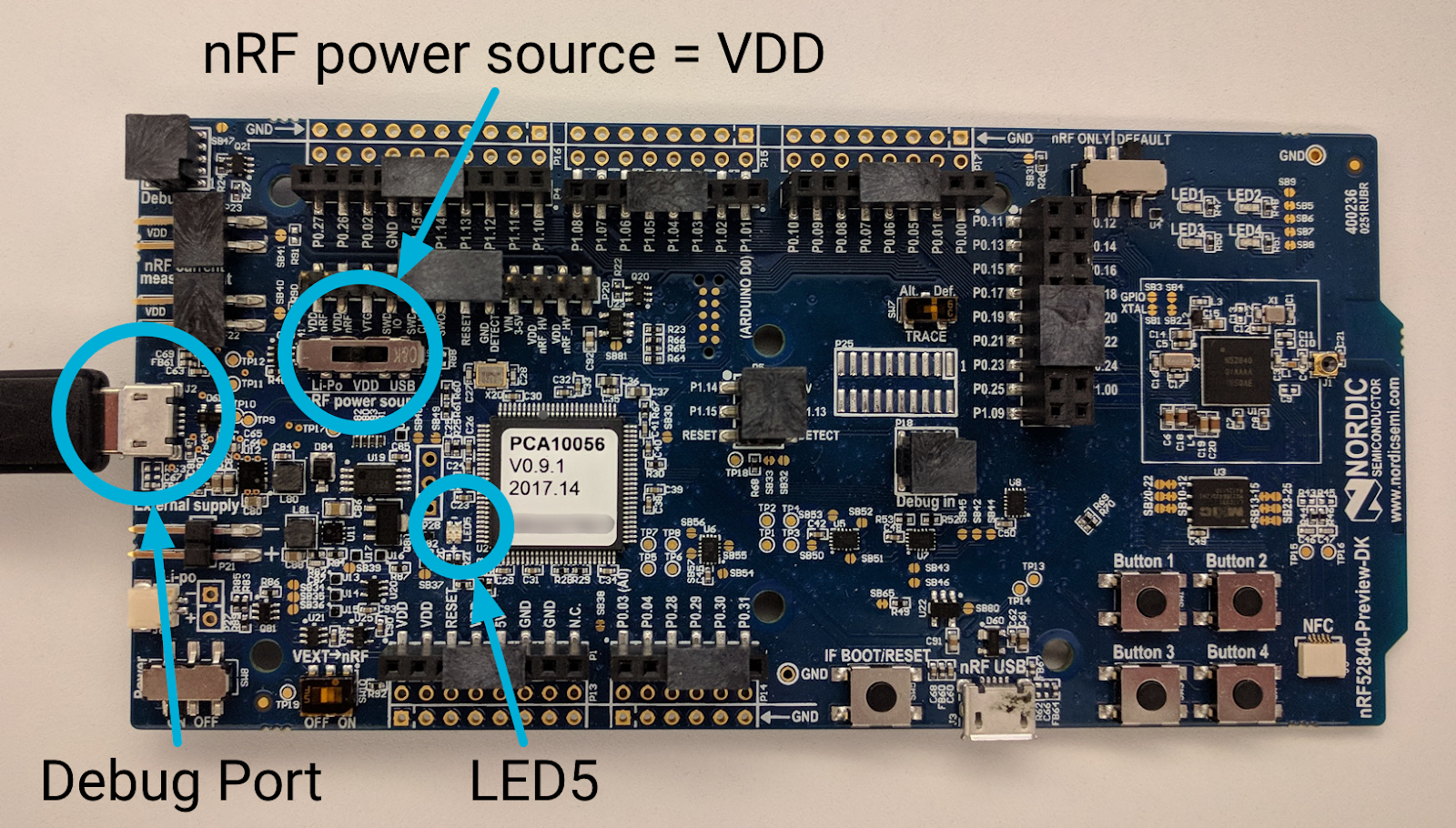
Collega il cavo USB alla porta di debug micro USB accanto al pin di alimentazione esterno sulla scheda nRF52840, quindi collegalo alla macchina Linux. Imposta correttamente LED5.
Come prima, prendi nota del numero di serie della scheda nRF52840:

Vai alla posizione degli strumenti a riga di comando nRFx e carica il file esadecimale FTD della CLI OpenThread sulla scheda nRF52840 utilizzando il numero di serie della scheda:
$ cd ~/nrfjprog
$ ./nrfjprog -f nrf52 -s 683704924 --verify --chiperase --program \
~/openthread/output/nrf52840/bin/ot-cli-ftd.hex --reset
Il LED 5 si spegnerà brevemente durante il lampeggio. In caso di esito positivo, viene generato il seguente output:
Parsing hex file. Erasing user available code and UICR flash areas. Applying system reset. Checking that the area to write is not protected. Programing device. Applying system reset. Run.
Ripeti il passaggio "Aggiorna le schede" per le altre due schede. Ogni scheda deve essere collegata alla macchina Linux nello stesso modo e il comando per il flashing è lo stesso, ad eccezione del numero di serie della scheda. Assicurati di utilizzare il numero di serie univoco di ogni scheda nel
nrfjprog lampeggiante.
In caso di esito positivo, su ogni scheda si accenderà LED1, LED2 o LED3. Potresti anche notare che il LED acceso passa da 3 a 2 (o da 2 a 1) subito dopo il lampeggio (la funzionalità di modifica del ruolo del dispositivo).
12. Funzionalità dell'applicazione
A questo punto, tutte e tre le schede nRF52840 dovrebbero essere alimentate ed eseguire la nostra applicazione OpenThread. Come descritto in precedenza, questa applicazione ha due funzionalità principali.
Indicatori del ruolo del dispositivo
Il LED acceso su ogni scheda riflette il ruolo attuale del nodo Thread:
- LED1 = Leader
- LED2 = Router
- LED3 = Dispositivo finale
Man mano che il ruolo cambia, cambia anche il LED acceso. Dovresti aver già visto queste modifiche su una o due schede entro 20 secondi dall'accensione di ogni dispositivo.
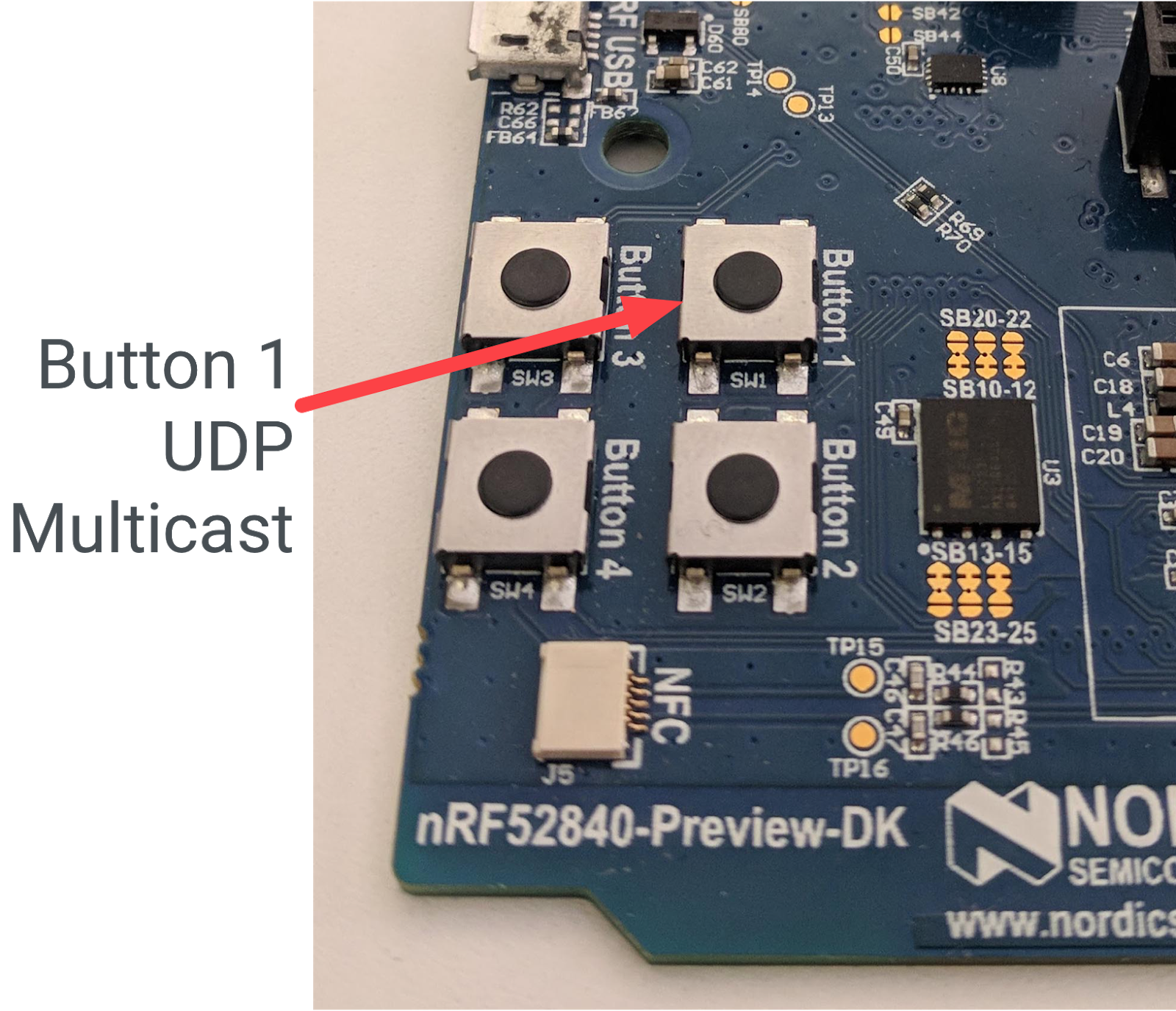
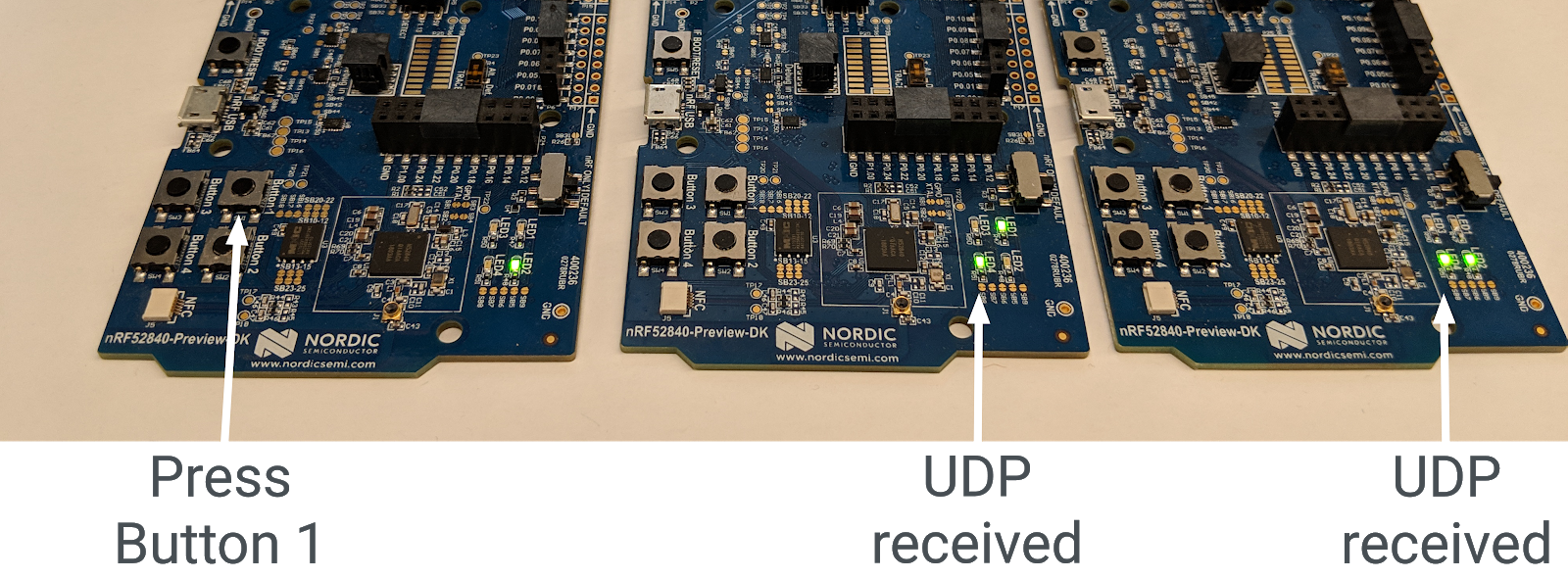
UDP Multicast
Quando viene premuto il pulsante 1 su una scheda, viene inviato un messaggio UDP all'indirizzo multicast locale della mesh, che include tutti gli altri nodi della rete Thread. In risposta alla ricezione di questo messaggio, il LED4 su tutte le altre schede si attiva o disattiva. Il LED4 rimane attivo o disattivato per ogni scheda finché non riceve un altro messaggio UDP.
13. Demo: osserva le modifiche al ruolo del dispositivo
I dispositivi di cui hai eseguito il flashing sono un tipo specifico di dispositivo Thread completo (FTD) chiamato dispositivo finale idoneo al routing (REED). Ciò significa che possono funzionare come router o dispositivo finale e possono passare da dispositivo finale a router.
Thread può supportare fino a 32 router, ma cerca di mantenere il numero di router tra 16 e 23. Se un REED si collega come dispositivo finale e il numero di router è inferiore a 16, viene promosso automaticamente a router. Questa modifica dovrebbe avvenire in un momento casuale entro il numero di secondi impostato per il valore otThreadSetRouterSelectionJitter nell'applicazione (20 secondi).
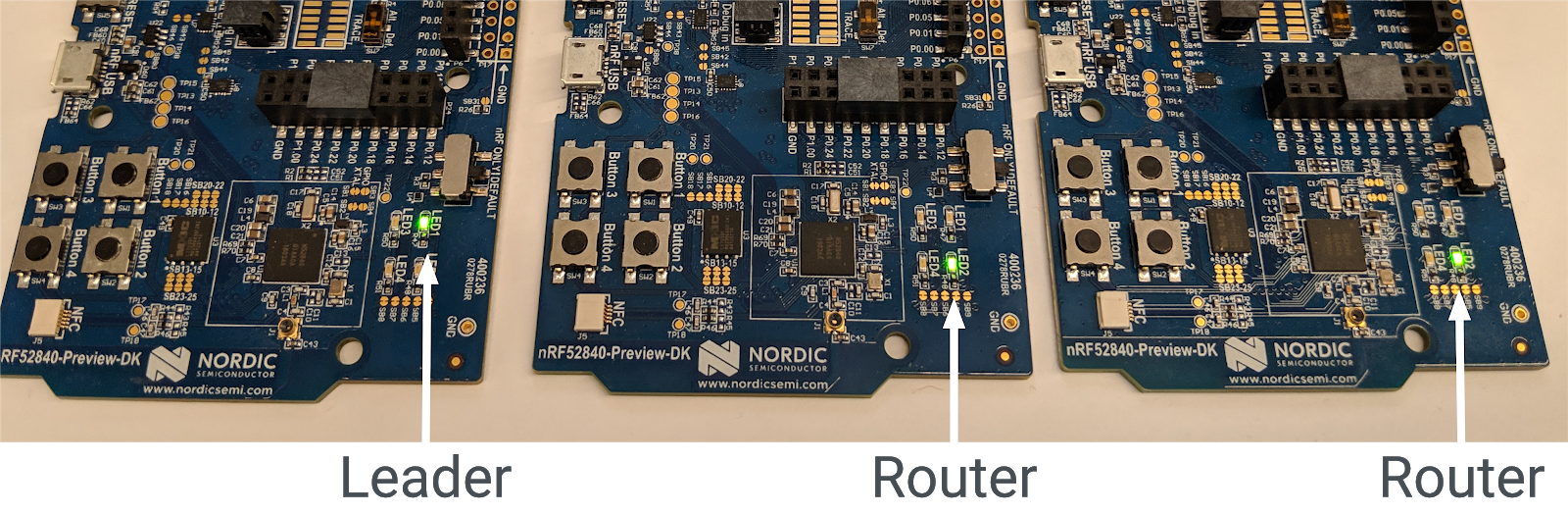
Ogni rete Thread ha anche un leader, ovvero un router responsabile della gestione dell'insieme di router in una rete Thread. Con tutti i dispositivi accesi, dopo 20 secondi uno di loro dovrebbe essere un leader (LED1 acceso) e gli altri due dovrebbero essere router (LED2 acceso).
Rimuovere il leader
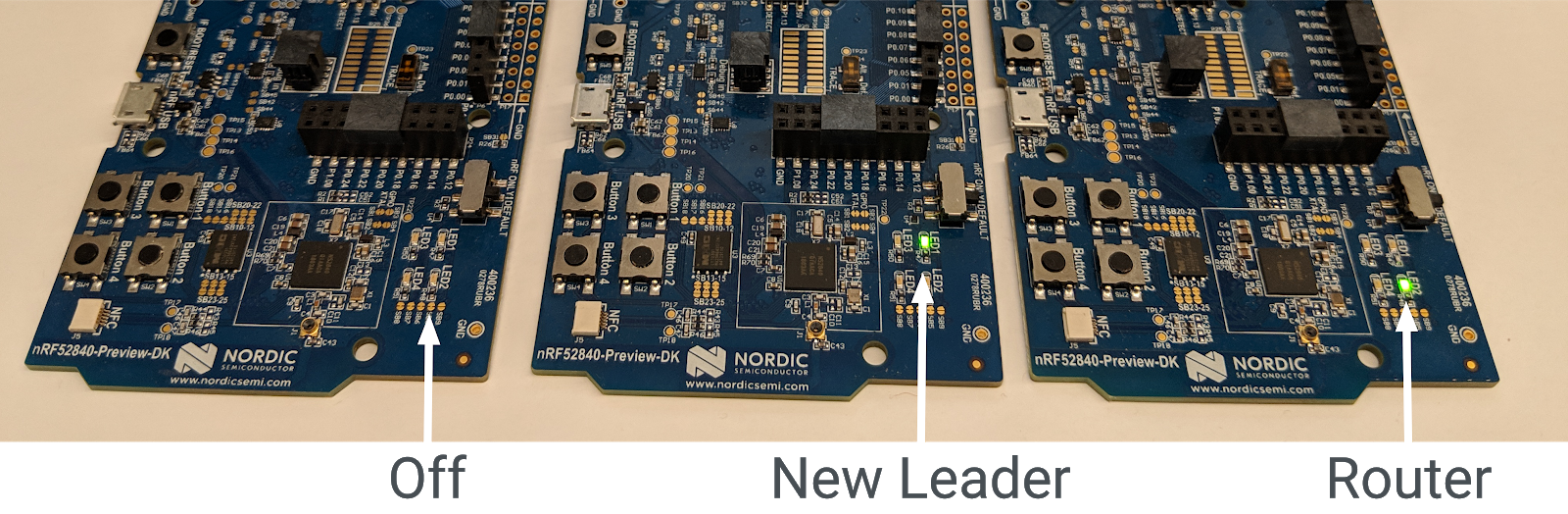
Se il leader viene rimosso dalla rete Thread, un altro router si promuove a leader per garantire che la rete ne abbia ancora uno.
Spegni la scheda principale (quella con il LED1 acceso) utilizzando l'interruttore Power. Attendi circa 20 secondi. Su una delle due schede rimanenti, il LED2 (router) si spegnerà e il LED1 (leader) si accenderà. Questo dispositivo è ora il leader della rete Thread.
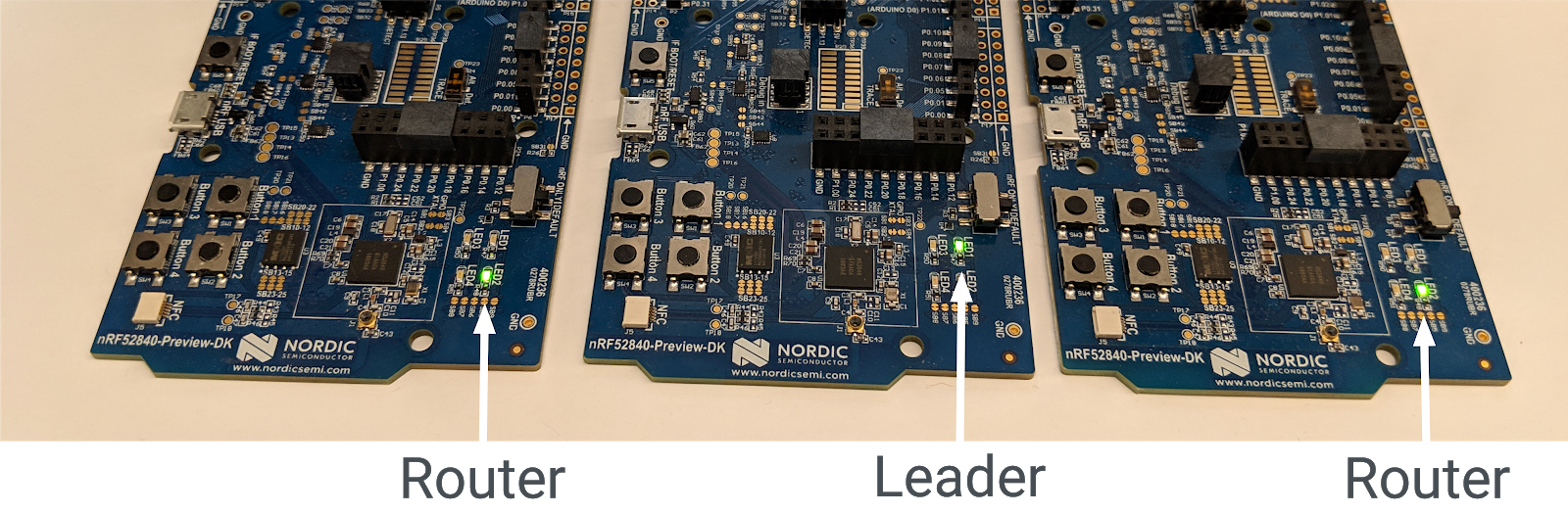
Riattiva la classifica originale. Dovrebbe riconnettersi automaticamente alla rete Thread come dispositivo finale (il LED 3 è acceso). Entro 20 secondi (il jitter di selezione del router) si promuove a router (il LED2 è acceso).
Reimpostare le bacheche
Spegni tutte e tre le schede, riaccendile e osserva i LED. La prima scheda accesa deve iniziare con il ruolo di leader (il LED1 è acceso). Il primo router in una rete Thread diventa automaticamente il leader.
Le altre due schede inizialmente si connettono alla rete come dispositivi finali (il LED 3 è acceso), ma dovrebbero diventare router (il LED 2 è acceso) entro 20 secondi.
Partizioni di rete
Se le schede non ricevono alimentazione sufficiente o la connessione radio tra loro è debole, la rete Thread potrebbe dividersi in partizioni e potresti avere più di un dispositivo visualizzato come Leader.
Il thread è auto-riparante, quindi le partizioni dovrebbero alla fine confluire in un'unica partizione con un solo leader.
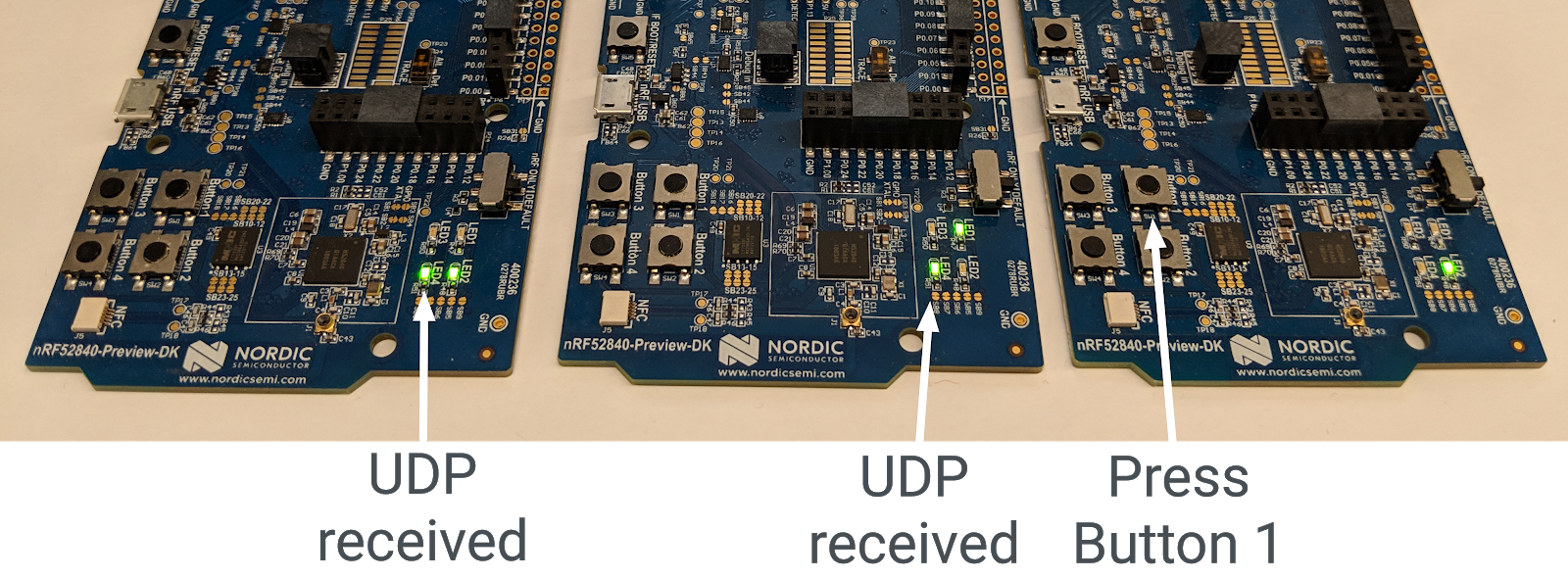
14. Demo: invia multicast UDP
Se continui dall'esercizio precedente, il LED4 non deve essere acceso su nessun dispositivo.
Scegli una tavola e premi il pulsante 1. Il LED4 su tutte le altre schede della rete Thread che eseguono l'applicazione deve alternare il proprio stato. Se continui dall'esercizio precedente, ora dovrebbero essere attivi.
Premi di nuovo il pulsante 1 per visualizzare la stessa bacheca. Il LED4 su tutte le altre schede dovrebbe riattivarsi.
Premi il pulsante 1 su un'altra scheda e osserva come il LED 4 si attiva/disattiva sulle altre schede. Premi il pulsante 1 su una delle schede in cui il LED 4 è attualmente acceso. Il LED4 rimane acceso per la scheda, ma si attiva e disattiva per le altre.
Partizioni di rete
Se le tue schede sono partizionate e c'è più di un Leader tra loro, il risultato del messaggio multicast sarà diverso tra le schede. Se premi il pulsante 1 su una scheda partizionata (e quindi l'unico membro della rete Thread partizionata), il LED 4 delle altre schede non si accenderà in risposta. In questo caso, ripristina le schede. Idealmente, formeranno una singola rete Thread e la messaggistica UDP dovrebbe funzionare correttamente.
15. Complimenti!
Hai creato un'applicazione che utilizza le API OpenThread.
Ora sai che:
- Come programmare i pulsanti e i LED sulle schede di sviluppo Nordic nRF52840
- Come utilizzare le API OpenThread comuni e la classe
otInstance - Come monitorare e reagire alle modifiche dello stato di OpenThread
- Come inviare messaggi UDP a tutti i dispositivi in una rete Thread
- Come modificare i Makefile
Passaggi successivi
Partendo da questo codelab, prova i seguenti esercizi:
- Modifica il modulo GPIO per utilizzare i pin GPIO anziché i LED integrati e collega LED RGB esterni che cambiano colore in base al ruolo del router
- Aggiungere il supporto GPIO per una piattaforma di esempio diversa
- Invece di utilizzare il multicast per eseguire il ping di tutti i dispositivi con la pressione di un pulsante, utilizza l'API Router/Leader per individuare ed eseguire il ping di un singolo dispositivo.
- Connetti la rete mesh a internet utilizzando un router di confine OpenThread e trasmetti in multicast dall'esterno della rete Thread per accendere i LED.
Per approfondire
Visita openthread.io e GitHub per una serie di risorse OpenThread, tra cui:
- Piattaforme supportate: scopri tutte le piattaforme che supportano OpenThread
- Build OpenThread: ulteriori dettagli sulla creazione e la configurazione di OpenThread
- Thread Primer: un ottimo riferimento sui concetti di Thread
Riferimento: