
1. Giriş

Google'ın OpenThread (OT), Thread'in açık kaynaklı bir uygulamasıdır. Google, bağlantılı ev ve ticari binalar için ürün geliştirme sürecini hızlandırmak amacıyla Google Nest ürünlerinde kullanılan ağ teknolojisini geliştiricilerin daha geniş bir kitleye sunmak için OpenThread'i yayınladı. Dar bir platform soyutlama katmanı ve küçük bir bellekte kaplanan yer ile OpenThread oldukça taşınabilir. Hem çip üzerinde sistem (SoC) hem de ağ yardımcı işlemcisi (NCP) tasarımlarını destekler.
Thread Spesifikasyonu, ev ve ticari bina uygulamaları için IPv6 tabanlı güvenilir, güvenli ve düşük güç tüketen kablosuz cihazdan cihaza iletişim protokolünü tanımlar.
Silicon Labs, OpenThread'i Silicon Labs donanımıyla çalışacak şekilde geliştirdi. Bu kaynak kodu GitHub'da ve Simplicity Studio 5 (SSv5) ile yüklenen bir yazılım geliştirme kiti (SDK) olarak da kullanılabilir. SDK, GitHub kaynak kodunun tamamen test edilmiş bir anlık görüntüsünü içerir. GitHub sürümüne kıyasla daha geniş bir donanım aralığını destekler ve GitHub'da bulunmayan dokümanlar ile örnek uygulamalar içerir.
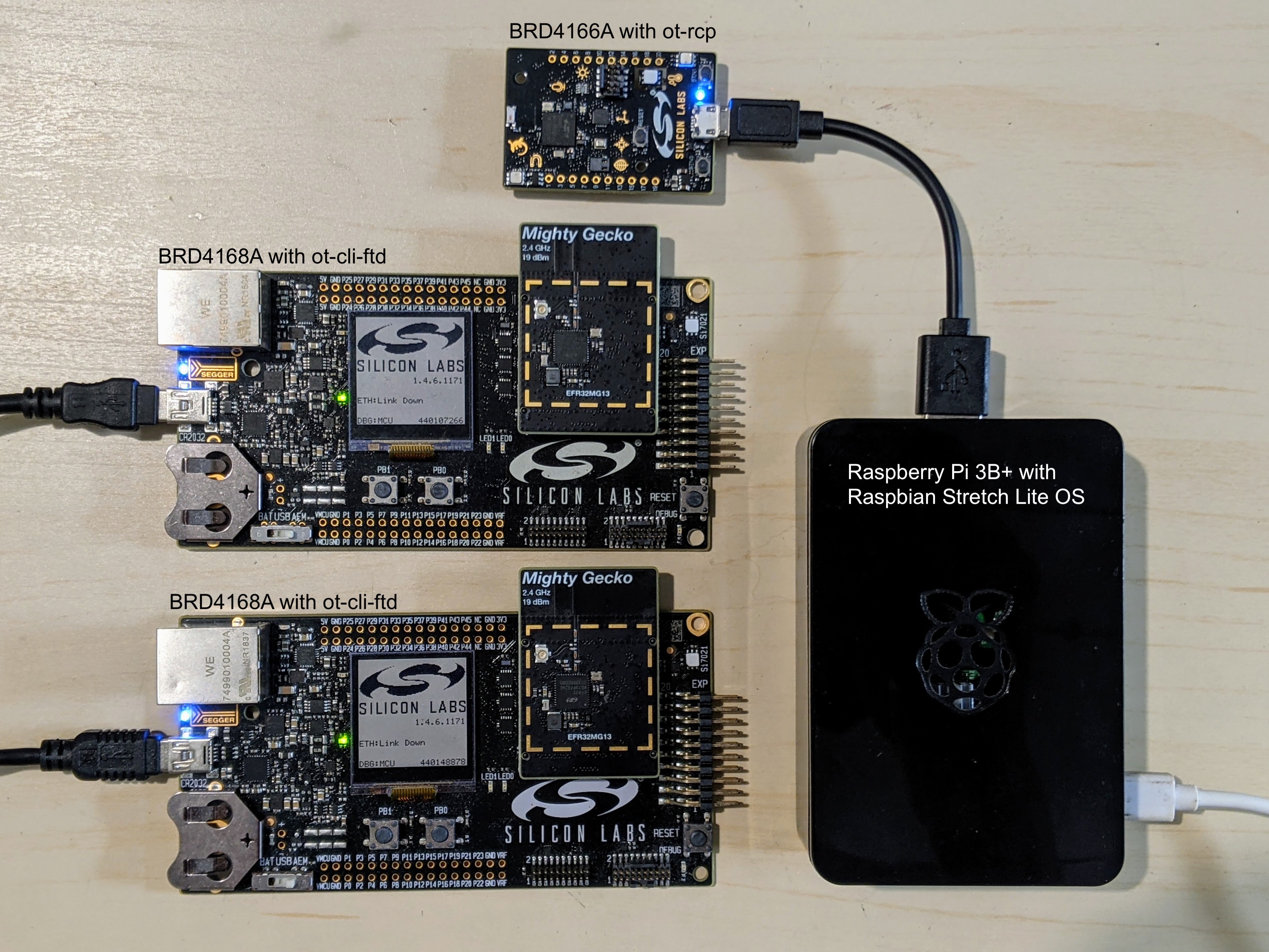
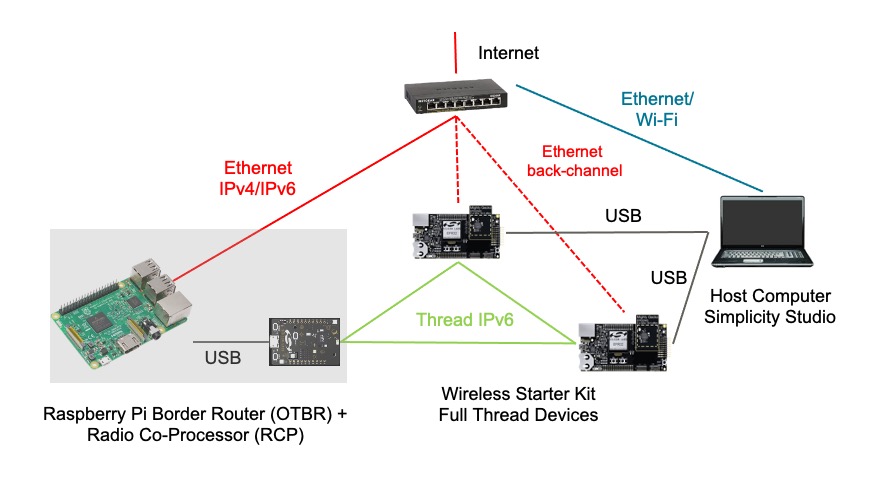
Bu kılavuzda, Silicon Labs OpenThread SDK ve Simplicity Studio 5'i kullanarak OpenThread uygulamaları geliştirmeye nasıl başlayacağınız açıklanmaktadır. Aşağıdaki resimde, codelab'de kullanılan OT Border Router (OTBR) ve iki Thread cihazıyla kurulu donanım ve kartlar (BRD'ler) gösterilmektedir.
Neler öğreneceksiniz?
- Silicon Labs Simplicity Studio IDE'yi kullanarak OpenThread projesi oluşturma
- OpenThread CLI ikili dosyalarını oluşturma ve Silicon Labs radyo kartlarına yükleme
- Docker kullanarak Raspberry Pi 3B+ veya daha yeni bir modeli OpenThread Border Router (OTBR) olarak ayarlama
- OTBR'de Thread ağı oluşturma
- Cihazların Thread ağına bant dışı olarak sağlanması.
- Düğümler arasındaki Thread iletişimini ping komutunu kullanarak doğrulama
2. Ön koşullar
Donanım:
- 3 EFR32MGxx radyo kartı (bu cihazların herhangi bir kombinasyonu kullanılabilir). Bu codelab'de RCP olarak BRD4166A, Full Thread Devices olarak ise iki BRD4168A kullanılıyor.
- EFR32MG12 (BRD4161A, BRD4166A, BRD4170A, BRD4304A)
- EFR32MG13 (BRD4168A)
- EFR32MG21 (BRD4180A, BRD4180B)
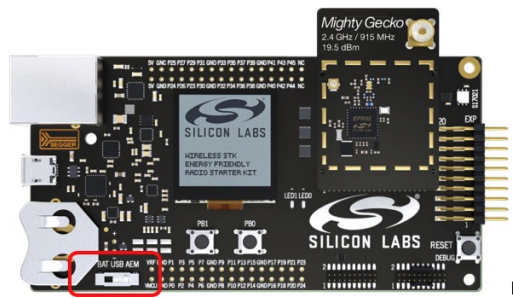
- BRD4001A: Radyo kartlarını barındırmak için kablosuz başlangıç ana kartları (WSTK). BRD4166A hariç tüm radyo kartları için birer başlatıcı ana kart gerekir. Ana kartları bağlamak ve bunlara güç vermek için mini USB kabloları veya BRD4166A için mikro USB kablosu.
- Ethernet üzerinden internete bağlı, Raspbian Stretch Lite OS görüntüsü veya Raspbian Stretch with Desktop yüklü bir Raspberry Pi 3B+ ya da daha yeni bir model. Bunu OT Border Router olarak yapılandırırız.
- En az 2 USB bağlantı noktası ve internet bağlantısı olan bir Windows/Linux/Mac ana makine sistemi. Donanım ve işletim sistemi gereksinimlerini SSv5 adresinden kontrol edin.
- Raspberry Pi'yi internete bağlamak için en az bir Ethernet kablosu. WSTK'lar, IP üzerinden hata ayıklama ve yanıp sönmeyi de destekler. Bu nedenle, WSTK'yı bir Ethernet anahtarı aracılığıyla ana sisteminize bağlamak için isteğe bağlı olarak ek Ethernet kabloları kullanılabilir.
Yazılım:
- Simplicity Studio v5, Windows/Linux/Mac ana sistemine yüklenmiş ve güncellenmiş olmalıdır.
- GNU ARM araç zinciri
- Gecko SDK Suite 3.2.0 veya sonraki sürümler ve Silicon Labs OpenThread SDK.
3. Donanım kurulumu
Bu Codelab,
- Solda gösterildiği gibi EFR32MG12 BRD4166A Thunderboard Sense 2.
- Sağda gösterildiği gibi iki EFR32MG13 BRD4168A.
- Simplicity Studio v5,
- ile macOS Catalina 10.15.7'ye yüklenmiş olmalıdır.
- Gecko SDK 3.2.0
- GNU ARM v7.2.1
Her bir Kablosuz Başlangıç Kiti ana kartını, aşağıdaki resimde gösterildiği gibi USB ile ana bilgisayara bağlayın. Bu bağlantılar, RCP ve uç cihazların programlanmasına ve ağ analizine izin verir. Öncelikle ana bilgisayarı kullanarak BRD4166A'yı ot-rcp yazılımıyla programlayacağız ve sonunda Raspberry Pi'ye bağlayacağız. İsteğe bağlı olarak, uç cihazlar ortak bir Ethernet anahtarı aracılığıyla ana bilgisayara bağlanabilir. Başlangıç kitleri, IPv4 üzerinden programlama ve ağ analizini de destekler.
4. Donanım yazılımı kurulumu
Başlamak için iki yöntem kullanabilirsiniz. Her iki seçenek de bu codelab için gerekli olan donanım yazılımlarını yüklemenize olanak tanır.
- Projeler: (Önerilir) Örnek bir uygulama oluşturun, derleyin ve yükleyin. Bu seçenek, uygulamayı projede özelleştirmenize olanak tanır.VEYA
- Demolar: (İsteğe bağlı) Önceden oluşturulmuş demoları örnek uygulamalardan herhangi biri için doğrudan radyo kartına yükleyin. Kullanıcıların, isteğe bağlı bir alıştırma olarak Demos donanım yazılımı kurulumunu denemeleri önerilir. Ayrıntılar için lütfen bu codelab'in sonundaki "İsteğe bağlı donanım yazılımı kurulumu - Demolar" bölümüne bakın.
Bu codelab'de projeye dayalı yöntemi kullanacağız.
Örnekleri kullanarak proje oluşturma
İki proje oluşturacağız. BRD4166A için ot-rcp projesi ve iki BRD4168A için ot-cli-ftd projesi. Lütfen aşağıdaki adımları uygulayın ve kartınız için uygun örnek uygulamayı seçin.
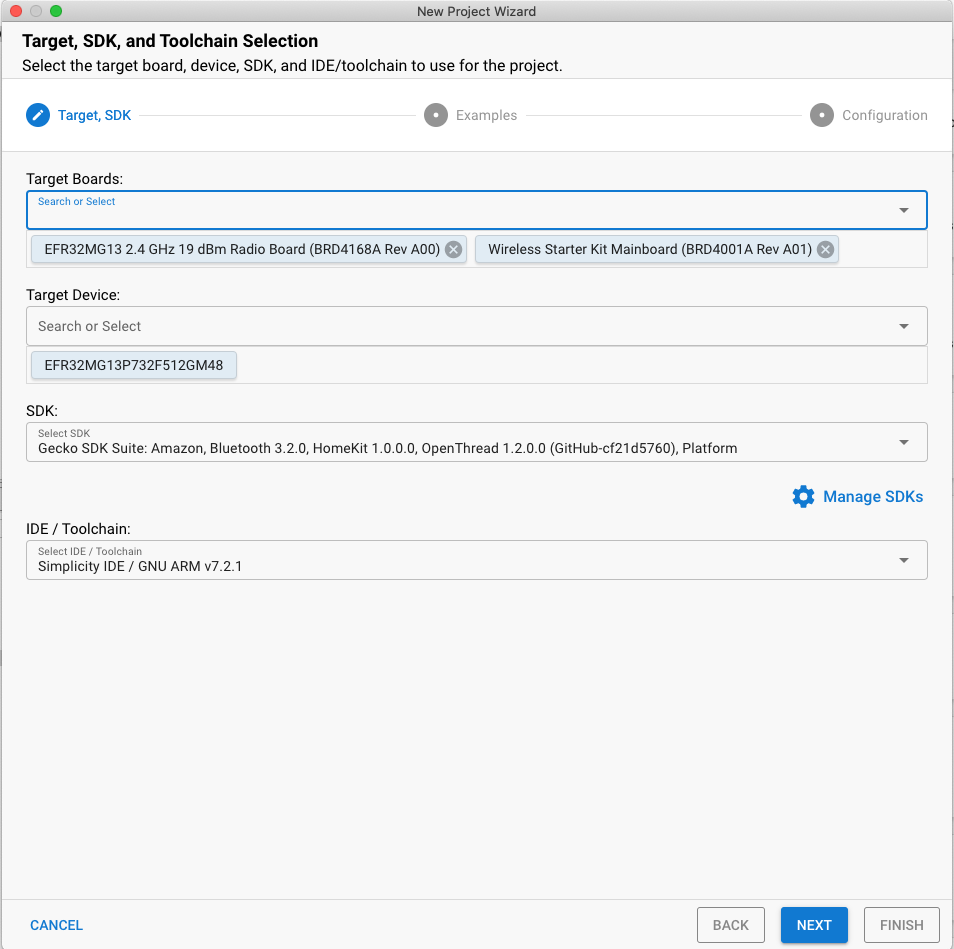
- Studio'nun File (Dosya) menüsünü açın ve New > Silicon Labs Project Wizard'ı (Yeni > Silicon Labs Proje Sihirbazı) seçin. Hedef, SDK ve Araç Zinciri Seçimi iletişim kutusu açılır. OpenThread tarafından desteklenen varsayılan Simplicity IDE / GNU araç zincirini değiştirmeyin. Sonraki'yi tıklayın.
- Hedef kartlar: Ana kartla (BRD4001A) birlikte seçilen radyo kartını (BRD4168A) gösterir.
- Hedef Cihaz: Bu alanda, yerleşik mikrodenetleyici çip (MCU) gösterilir. BRD4168A'da yerleşik bir EFR32MG13 MCU bulunur.
- SDK: Burada, üzerinde çalıştığınız OT'nin SDK sürümünü seçebilirsiniz. Paket bilgileri arasında SDK etiketi ve OpenThread'in Silicon Labs derlemesi (ör.
Platform 4.0.1.0veOpenThread 2.0.1.0 (GitHub-55af6ce2c)) yer alır. - IDE/ Araç Zinciri: OT projesini derlemek için kullanılacak araç zinciri. GNU ARM kullanıyoruz.
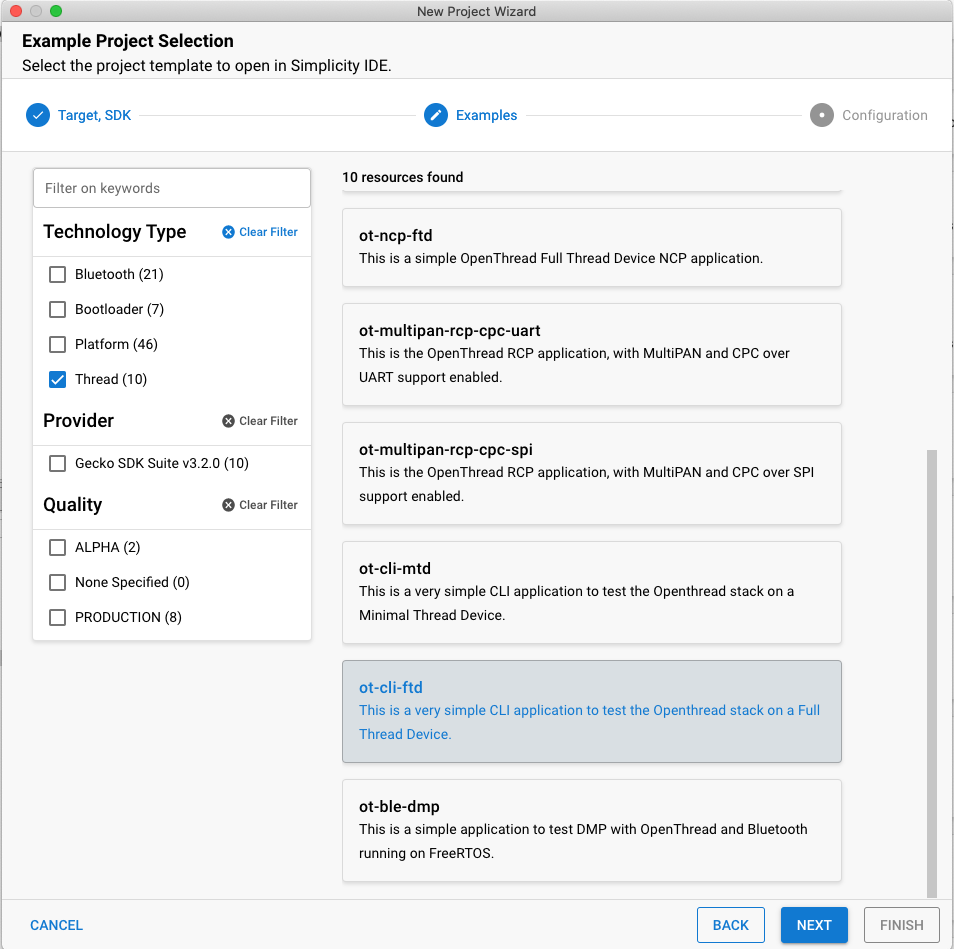
- Örnek Proje Seçimi iletişim kutusu açılır. Örnek projelerin listesini görürsünüz. Belirli bir örneği aramak için Thread Teknoloji Türü'nü ve anahtar kelime filtrelerini kullanın. Gecko SDK Suite sürüm numarasını not etmeyi unutmayın. Raspberry Pi'yi sınır yönlendirici olarak ayarlarken bu sürüm etiketine ihtiyacınız olacaktır. ot-cli-ftd'yi seçin ve SONRAKİ'yi tıklayın.
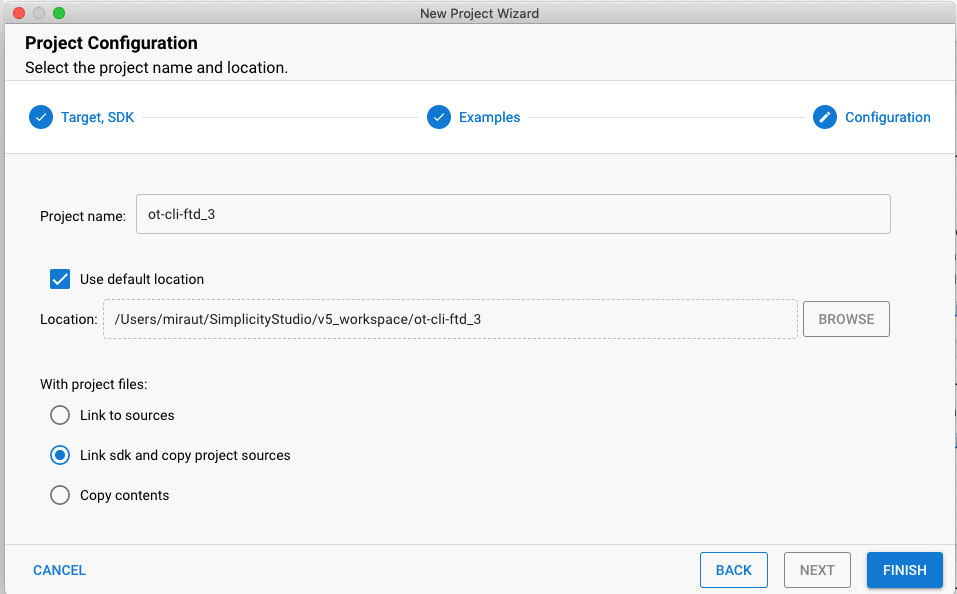
- Proje Yapılandırması iletişim kutusu açılır. Burada projenizi yeniden adlandırabilir, varsayılan proje dosyası konumunu değiştirebilir ve proje dosyalarına bağlantı oluşturup oluşturmayacağınızı veya bunları kopyalayıp kopyalamayacağınızı belirleyebilirsiniz. Bağlı proje dosyaları SDK'yı gösterir ve yaptığınız tüm değişiklikler SDK'da yapılır ve gelecekteki projelerde kullanılır. Proje kaynaklarını kopyalayarak SDK dosyalarının bozulmadan kalmasını sağlayacak şekilde projeye özel bir kopyayı düzenleyebilirsiniz. Varsayılan ve önerilen seçenek "SDK'yı bağla ve proje kaynaklarını kopyala"dır. SON'u tıklayın.
- Simplicity IDE Perspective, Project Configurator OVERVIEW (GENEL BAKIŞ) sekmesi açıkken açılır.
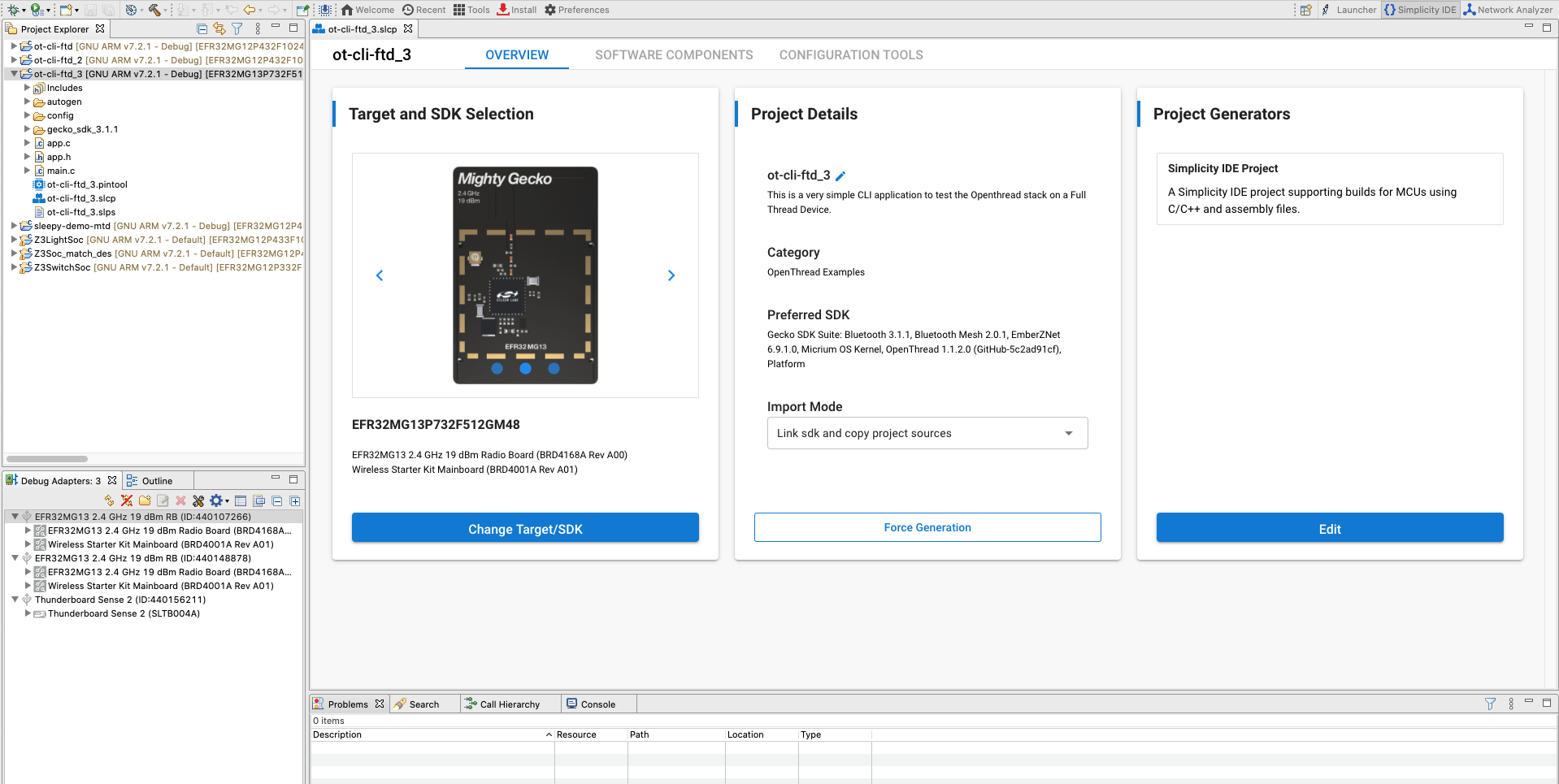
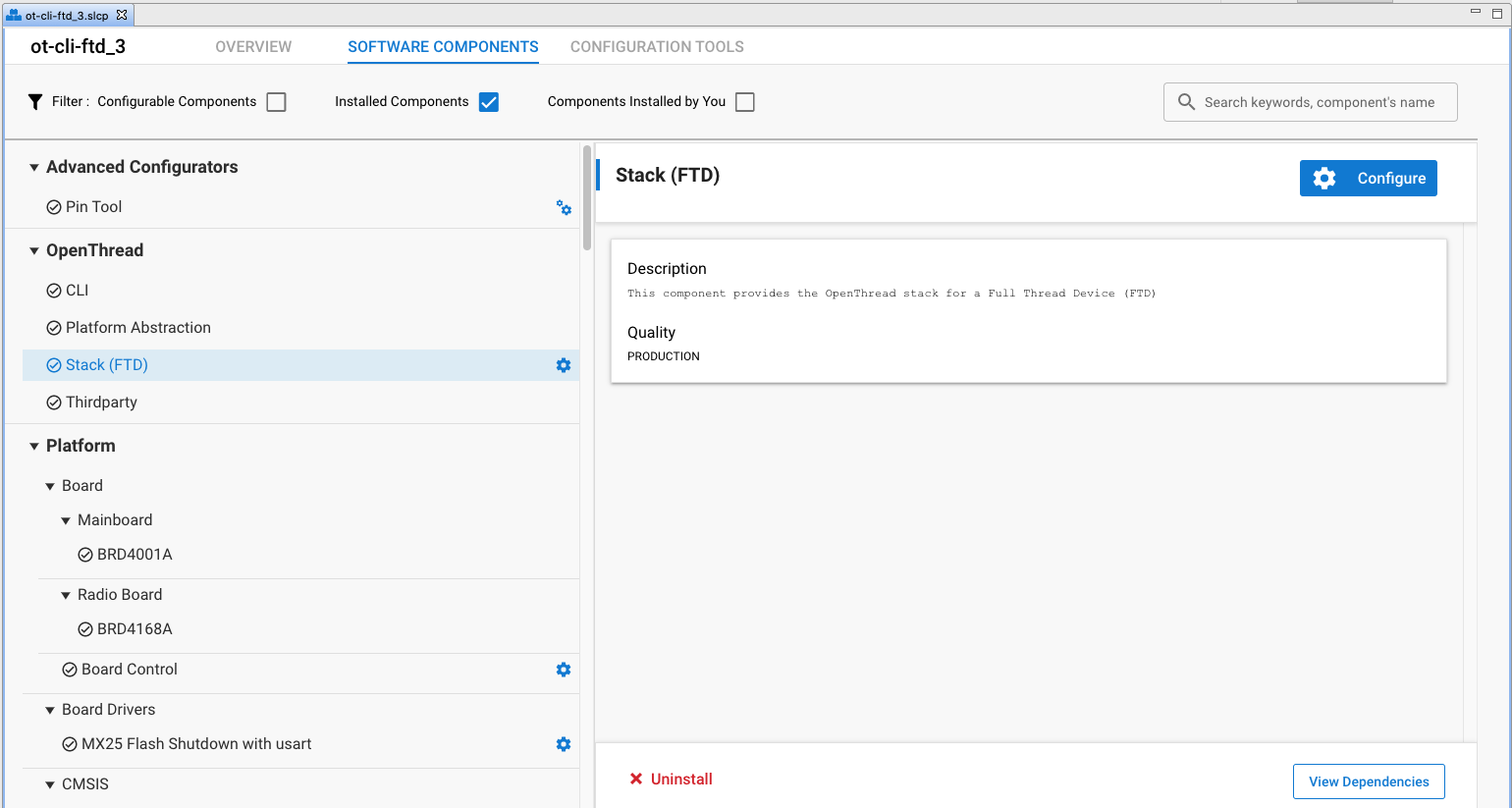
Proje, Yazılım Bileşenleri sekmesinden bileşenler yüklenip kaldırılarak ve yüklenen bileşenler yapılandırılarak ayarlanır. Yüklü bileşenler kontrol edilir. Örnek uygulama tarafından yüklenen bileşenlerin filtrelenmiş listesini görmek için Yüklü Bileşenler'i tıklayın. Yaptığınız tüm değişiklikler otomatik olarak kaydedilir ve proje dosyaları otomatik olarak oluşturulur. İlerleme durumu, Simplicity IDE perspektifinin sağ alt köşesinde gösterilir.
Bu demoda örnek uygulamaların varsayılan yapılandırmasını kullanacağız. Diğer kartınız için ot-rcp projesini oluşturmak üzere yukarıdaki adımları tekrarlayın.
Projeleri oluşturma ve yükleme
Hem ot-rcp hem de ot-cli-ftd projelerini oluşturun ve yükleyin.
- Projeniz yapılandırıldıktan sonra üst araç çubuğunda Derleme kontrolü (çekiç simgesi)'nü tıklayın. Alternatif olarak projeyi sağ tıklayıp projeyi oluştur'u da tıklayabilirsiniz.

- İlerleme durumu Konsol'da ve sağ alttaki ilerleme çubuğunda gösterilir. Projenizle ilgili tüm hata veya uyarılar da bu çıkış penceresinde gösterilir.
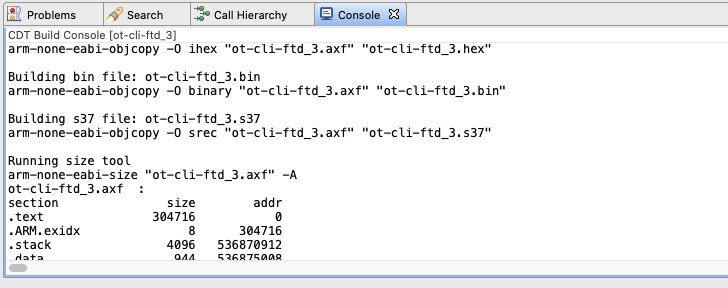
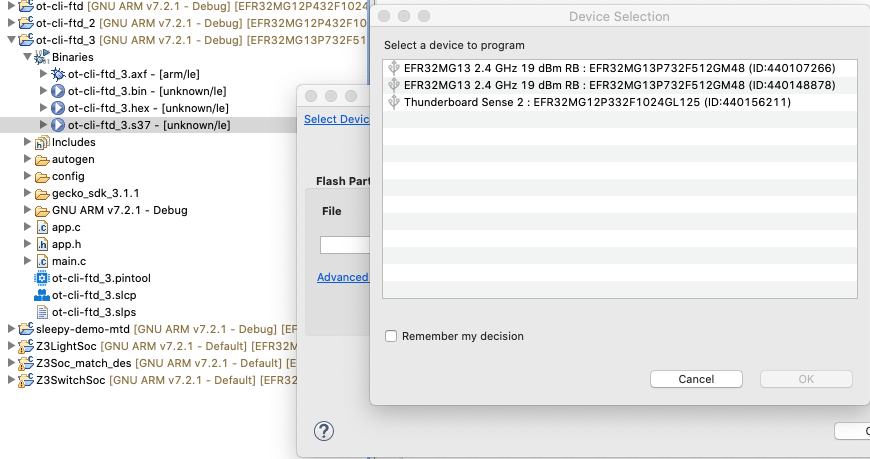
- İkili dosyalar, proje derleme işlemi başarıyla tamamlandıktan sonra oluşturulur. İkili görüntüyü Proje Gezgini görünümünden yükleyebilirsiniz. Derleyici alt dizininde .bin, .hex veya .s37 dosyasını bulun. Dosyayı sağ tıklayın ve Flash to Device'ı (Cihaza Flash) seçin. Birden fazla cihazınız bağlıysa programlamak için bir cihaz seçin ve Tamam'ı tıklayın. Flash Programmer, dosya yolu doldurulmuş şekilde açılır. PROGRAM'ı tıklayın.
5. Donanım yazılımı kurulum özeti
Bu noktada, uygun donanım yazılımını oluşturmuş, derlemiş ve radyo kartlarına yüklemiş olmanız gerekir. ot-rcp, BRD4166A'ya yüklendikten sonra ana makine sisteminden çıkarın ve bu kartı Raspberry Pi'ye bağlayın.
Bu bölümü tamamladıktan sonra Thread ağ donanımınızın kurulumu aşağıdaki gibi görünür.
6. ot-cli-ftd cihazları için Seri Konsol'u ayarlama
Konsol arayüzünü başlatmak için Simplicity IDE perspektifinde, Cihazlar Görünümü / Hata Ayıklama Adaptörleri Penceresi'nde J-Link cihazınızı sağ tıklayın. Launch Console'u (Konsolu Başlat) seçin. Konsolda istem almak için Seri 1 sekmesini seçip Enter tuşuna basın. FTD düğümünün durumunu kontrol edin.
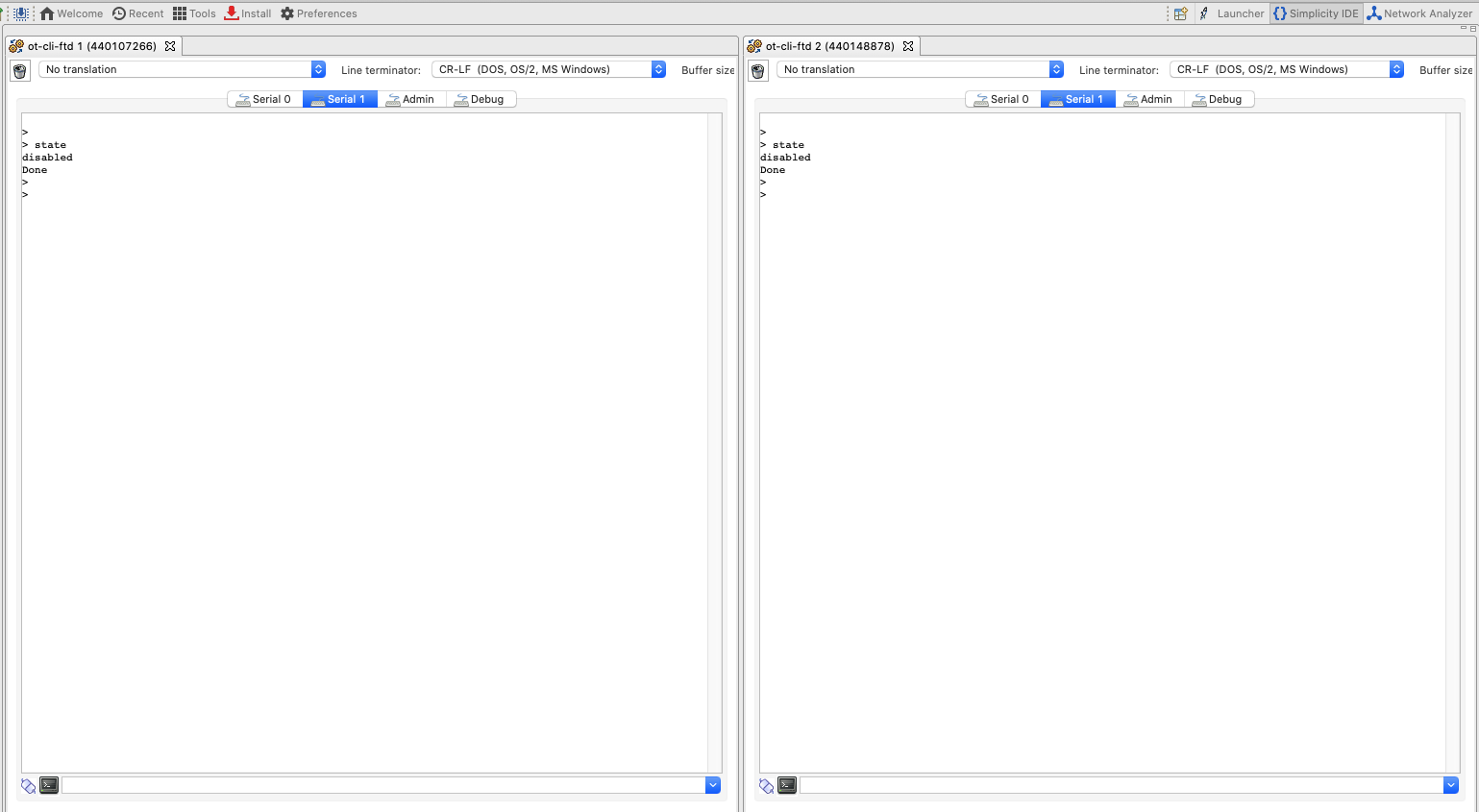
ot-rcp için henüz bir konsolumuz olmadığını fark edeceksiniz. Bir sonraki adımda Raspberry Pi'yi bir OT sınır yönlendiricisi olarak yapılandıracak ve ot-rcp için konsolu ayarlayacağız.
7. Raspberry Pi'yi sınır yönlendirici olarak ayarlama
Silicon Labs, şirketin Docker kapsayıcısının OTBR ile dağıtılmasını önerir. OTBR'yi bir container'da çalıştırmak, kolayca dağıtılabilir yapılar oluşturmaya ve hızlı geliştirme prototipleme ve test etmeye olanak tanır.
Silicon Labs OTBR görüntüleri, etiketlerle birlikte siliconlabsinc DockerHub'da barındırılır. Her etiket bir GSDK sürümüne karşılık gelir:
https://hub.docker.com/r/siliconlabsinc/openthread-border-router/tags
Docker container'ları, belirli bir sürüm için Simplicity Studio 5 kullanılarak oluşturulan RCP'lerle birlikte kullanılmalıdır. Kapsayıcı etiketi sürümünü, test ettiğiniz GSDK sürümüyle eşleştirdiğinizden emin olun. Örneğin, Örnek Proje Seçimi penceresinden ot-rcp seçtiğinizde GDSK sürümünüz Gecko SDK Suite v4.0.1 (140) ise siliconlabsinc/openthread-border-router:gsdk-4.0.1 resmini kullanın.
Raspberry Pi kurulumu
- SD kartınızda Raspbian Stretch Lite OS görüntüsünü veya Raspbian Stretch with Desktop'u yüklediğinizden emin olun.
- Raspberry Pi'ye SSH bağlantısı kurabilir veya doğrudan Raspbian Desktop ile çalışmayı seçebilirsiniz. Bir terminal penceresi açın.
- Docker'ı yüklemeden önce yerel depolarınızı ve paket yöneticinizi (apt-get update ve apt-get upgrade) güncellediğinizden emin olun.
Docker görüntüsünü yükleme
- RPi'nize aşağıdaki komutla Docker'ı yükleyin.
curl -sSL https://get.docker.com | sh
- İşlem tamamlandıktan sonra, her komuttan önce sudo gerektirmemek için Docker kullanıcı ayarlarını değiştirebilirsiniz. Yeniden başlatma gerekir.
sudo usermod -aG docker $USER
- Kapsayıcıları yüklemek için aşağıdaki komutları verin. RCP'nizle aynı anda yalnızca bir Border Router kapsayıcısı çalıştırabileceğinizi unutmayın. Ayrıca, Simplicity Studio GSDK sürümünüzü doğru Docker görüntüsüyle eşleştirdiğinizden emin olun. Örneğin,
gsdk-4.0.1:docker pull siliconlabsinc/openthread-border-router:gsdk-4.0.1
Docker'ı yapılandırma ve çalıştırma
- RCP'nizi başlatma sırasında bağlamak için OTBR'de kullanmak istediğiniz TTY bağlantı noktasını yapılandırmanız gerekir. RCP cihazınızın TTY bağlantı noktasını bulun. Bunu yapmanın en kolay yolu, RCP bağlandıktan sonra
/tty/dev... girişini aramaktır. Genellikle/dev/ttyUSB0veya/dev/ttyACM0olmalıdır. - Docker yüklemenizi aşağıdaki komutla çalıştırın. Docker görüntünüzün adını eşleşen GSDK sürümüyle değiştirdiğinizden emin olun. Örneğin,
gsdk-4.0.1:docker run -d --name "otbr" \ --sysctl "net.ipv6.conf.all.disable_ipv6=0 net.ipv4.conf.all.forwarding=1 net.ipv6.conf.all.forwarding=1" \ -p 8080:80 --dns=127.0.0.1 -it \ --volume /dev/ttyACM0:/dev/ttyACM0 \ --privileged siliconlabsinc/openthread-border-router:gsdk-4.0.1 \ --radio-url spinel+hdlc+uart:///dev/ttyACM0?uart-baudrate=460800 \ --backbone-interface eth0
-d, kapsayıcının ayrılmış modda çalışmasını sağlar.docker logskomutunu kullanarak kapsayıcının çalışan günlüklerini istediğiniz zaman görebilirsiniz.--name, Docker kapsayıcısı düzgün şekilde kapatılana (veya kaldırılana) kadar yapışkan kalır.- 8080 numaralı bağlantı noktası, Border Router yönetim web sayfasını barındıran web sunucusunun bağlantı noktasını gösterir.
?uart-baudrate=460800, UART üzerinden parçalanma / yeniden birleştirme sorunlarını önlemek için radyo URL'si seçeneklerinde gereklidir. Bu sorunlar, uzun IPv6 paketleriyle DTLS gibi maliyetli işlemlerle ortaya çıkar.
RCP düğümüyle etkileşim kurma
Docker çalıştıktan sonra bu komutu kullanarak etkileşimli bir kabuk aracılığıyla RCP düğümüyle iletişim kurabilirsiniz. RCP düğümünün durumunu kontrol edin.
$ docker exec -ti otbr sh -c "sudo ot-ctl" > state disabled Done
Çalışan kapsayıcı kimliklerinin listesini alabilirsiniz.
$ docker ps -aq
Sınır yönlendiricinin günlük çıkışını çalıştırmak için OTBR Docker container'ının çalıştığı pencereyi kontrol edebilir veya container günlüğünü aşağıdaki gibi takip edebilirsiniz:
$ docker logs [container-id] -f
İsteğe bağlı olarak, Docker kapsayıcısı düzgün şekilde yüklendiyse görüntünüzü durdurabilir, kaldırabilir veya sonlandırabilirsiniz.
$ docker stop otbr
$ docker rm otbr
$ docker kill otbr
İsteğe bağlı: Kabuktan çıkmak için CNTL + C tuşlarını kullanın.
Bu noktada 3 konsolunuz olmalıdır.
- Simplicity Studio'da
ot-cli-ftdiki konsol, Full Thread cihaz olarak ayarlanır. - OT sınır yönlendiricisi olarak ayarlanan Raspberry Pi'de bir
ot-ctletkileşimli kabuk.
Artık Thread ağı oluşturmaya hazırız.
8. Thread ağı oluşturma
RCP'yi ayarlama
Ağı oluşturmak için RCP düğümüyle iletişim kurmak üzere kullanılan OTBR'de ot-ctl kabuğunu kullanırız. Aşağıdaki komutları gösterilen sırayla girin:
Dizin | Komut | Komut açıklaması | Beklenen Yanıt | ||
1 |
| Yeni bir ağ yapılandırması oluşturun. | Bitti | ||
2 |
| Yeni veri kümesini Etkin Operasyonel Veri Kümesi'ne işleyin. | Bitti | ||
3 |
| Thread arayüzünü etkinleştirin. | Bitti | ||
4 |
| Thread protokolü işlemini etkinleştirin ve ekleyin. | Bitti | ||
İş parçacığı arayüzünün açılması için 10 saniye bekleyin. | |||||
5 |
| Cihaz durumunu kontrol edin. Lider olmalıdır. | Lider | ||
6 |
| Ağ yapılandırmasını görüntüleyin. | Etkin Zaman Damgası: 1 | ||
İki FTD'yi bu ileti dizisi ağına bağlamak için ot-cli-ftd üzerindeki kanal numarasını ve ağ anahtarını kullanacağız.
FTD'yi Thread ağımıza kurma ve ekleme (bant dışı yöntem)
Bant dışı yöntemde tüm güvenlik bilgilerini biliriz ve düğümü manuel olarak ekleriz. Simplicity konsollarında, aşağıdaki komutları gösterilen sırayla kullanarak her iki FTD'yi de ağımıza ekleyin.
Dizin | Komut | Komut açıklaması | Beklenen Yanıt | ||
1 |
| OTBR tarafından kullanılan kanalı ayarlayın. | Bitti | ||
2 |
| Bir cihazın Thread ağına bağlanması için yalnızca Ağ Anahtarı gerekir. | Bitti | ||
3 |
| Yeni veri kümesini Etkin Operasyonel Veri Kümesi'ne işleyin. | Bitti | ||
4 |
| Thread arayüzünü etkinleştirin. | Bitti | ||
5 |
| Thread protokolü işlemini etkinleştirin ve ekleyin. | Bitti | ||
Cihaz katılırken ve kendini yapılandırırken 20 saniye bekleyin. | |||||
6 |
| Ağ yapılandırmasını görüntüleyin. | çocuk | ||
Thread cihazları arasındaki iletişim
Cihazların birbiriyle iletişim kurup kuramadığını kontrol etmek için ping komutunu kullanacağız. Ping komutunu kullanmak için cihazların IPv6 adreslerine ihtiyacımız var. Bunlar ipaddr komutu kullanılarak elde edilebilir.
> ipaddr fd5c:c6b:3a17:40b9:0:ff:fe00:fc00 # Leader Anycast Locator (ALOC) fd5c:c6b:3a17:40b9:0:ff:fe00:1800 # Routing Locator (RLOC) fd5c:c6b:3a17:40b9:84e2:bae8:bd5b:fa03 # Mesh-Local EID (ML-EID) fe80:0:0:0:c449:ca4a:101f:5d16 # Link-Local Address (LLA)
Her iki FTD'den de OTBR'nin RLOC adresini kullanarak OTBR'ye ping gönderin.
> ping fd5c:c6b:3a17:40b9:0:ff:fe00:1800 Done > > 16 bytes from fd5c:c6b:3a17:40b9:0:ff:fe00:1800: icmp_seq=3 hlim=64 time=30ms 16 bytes from fd5c:c6b:3a17:40b9:0:ff:fe00:1800: icmp_seq=3 hlim=64 time=52ms
Yanıt, alınan yükü ve iletişimin başarılı olduğunu gösterir. OTBR'den FTD'lere ping göndermek için bu işlemi tekrarlayın.
9. Tebrikler
Thread ağı oluşturdunuz.
Artık şunları biliyorsunuz:
- Silicon Labs Simplicity Studio IDE'yi kullanarak OpenThread projesi oluşturma
- OpenThread CLI ikili dosyalarını oluşturma ve Silicon Labs radyo kartlarına yükleme
- Docker kullanarak Raspberry Pi 3B+ veya daha yeni bir modeli OpenThread Border Router (OTBR) olarak ayarlama
- OTBR'de Thread ağı oluşturma
- Cihazların Thread ağına bant dışı olarak sağlanması.
- Düğümler arasındaki Thread iletişimini ping komutunu kullanarak doğrulama
Daha fazla bilgi
Aşağıdakiler de dahil olmak üzere çeşitli OpenThread kaynakları için openthread.io ve GitHub'u inceleyin:
- Desteklenen Platformlar: OpenThread'i destekleyen tüm platformları keşfedin.
- OpenThread'i derleme: OpenThread'i derleme ve yapılandırma hakkında daha fazla bilgi
- Thread Primer: Bu Codelab'de yer alan tüm Thread kavramlarını kapsar.
- Silicon Labs OpenThread Eğitimi: OpenThread'e giriş, devreye alma ve sınır yönlendiriciler hakkında bilgi ve OpenThread ağı oluşturma alıştırması.
- QSG170: Silicon Labs OpenThread Hızlı Başlangıç Kılavuzu: Silicon Labs Thread geliştirme için başlangıç sürecini ayrıntılı olarak ele alır.
- AN1256: Silicon Labs RCP'yi OpenThread Border Router ile Kullanma: Raspberry Pi Border Router Host için Derleme ve Kurulum Talimatları
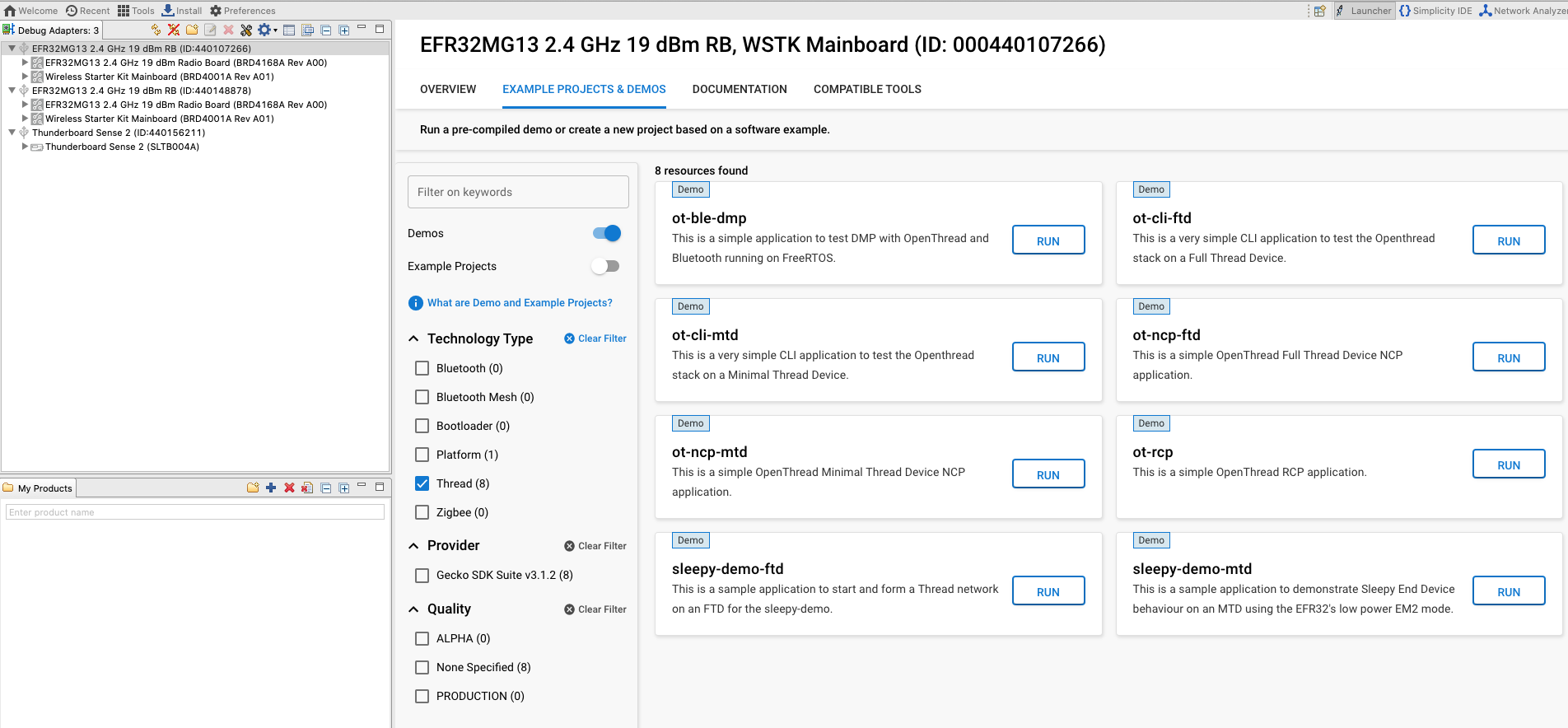
10. İsteğe bağlı donanım yazılımı kurulumu - Demolar
Demolar, uyumlu bir cihaza indirilmeye hazır, önceden oluşturulmuş donanım yazılımı görüntüleridir. Simplicity Studio'da parçanız için demo olup olmadığını öğrenmenin en hızlı yolu, Debug Adapters görünümünde parçanızı tıklayıp Launcher Perspective'teki EXAMPLE PROJECTS & DEMOS (ÖRNEK PROJELER VE DEMOLAR) sekmesine gitmektir. Örnek Projeler filtresini devre dışı bırakın ve Teknoloji Türü bölümünde İş Parçacığı radyo düğmesini işaretleyin.
OpenThread SDK ile birlikte sağlanan önceden derlenmiş demo uygulaması görüntüleri aşağıdaki kartlarla uyumludur:
- BRD4161a
- BRD4166a
- BRD4168a
- BRD4180a
- BRD4304a
Bu liste, gelecekteki SDK sürümlerinde daha fazla radyo kartı içerecek şekilde güncellenebilir. Desteklenen parçaların tam listesi için lütfen Belgeler bölümündeki Silicon Labs OpenThread SDK sürüm notlarına bakın.
Aşağıdaki demoları ilgili kartlarda yükleyin. Yüklemek için soldaki Hata Ayıklama Adaptörleri bölümünde kartınızı seçin ve ilgili örnek uygulamalar için ÇALIŞTIR'ı tıklayın. Bir pop-up pencerede flaş ilerleme durumu gösterilir.
- BRD4166A: ot-rcp: Bu cihaz, OT sınır yönlendiricisi için Radyo Yardımcı İşlemcisi olarak işlev görür. Thread ağı oluşturmak ve diğer iki cihazı Thread ağına dahil etmek için bu cihazı kullanacağız. Bu cihaz, bir sınır yönlendirici olarak Thread ağındaki cihazların internet üzerinden iletişim kurması için de ağ geçidi görevi görür.
- İki BRD4168A: ot-cli-ftd: Bu iki cihaz, Tam Thread Cihazı olarak işlev görür. OTBR tarafından oluşturulan Thread ağına katılırlar.