
OpenThread hỗ trợ các thiết kế Bộ đồng xử lý. Khi tạo các ví dụ về OpenThread, một hình ảnh chương trình cơ sở cho mỗi thiết kế bộ đồng xử lý sẽ được tạo tự động. Để biết thêm thông tin, hãy tham khảo phần Tệp nhị phân.
Bộ đồng xử lý vô tuyến (RCP)

Trong thiết kế RCP, lõi của OpenThread nằm trên bộ xử lý máy chủ chỉ với "bộ điều khiển" lớp MAC tối thiểu trên thiết bị có đài Thread. Bộ xử lý máy chủ lưu trữ thường không ở chế độ ngủ trong thiết kế này, một phần là để đảm bảo độ tin cậy của mạng Thread.
Việc giao tiếp giữa RCP và bộ xử lý máy chủ được OpenThread Daemon quản lý thông qua giao diện SPI theo giao thức Spinel.
Ưu điểm ở đây là OpenThread có thể tận dụng các tài nguyên trên bộ xử lý mạnh mẽ hơn.
Thiết kế này hữu ích cho những thiết bị ít nhạy cảm với các hạn chế về nguồn điện. Ví dụ: bộ xử lý máy chủ trên camera quay video luôn bật để xử lý video.
Bộ định tuyến biên OpenThread hỗ trợ thiết kế RCP. Để biết thêm thông tin, hãy tham khảo Bộ định tuyến biên OpenThread.
Để tạo một RCP, hãy tham khảo các Lớp học lập trình sau:
Xây dựng mạng Thread bằng nRF52840 Bộ định tuyến biên Thread
Bộ đồng xử lý mạng (NCP)
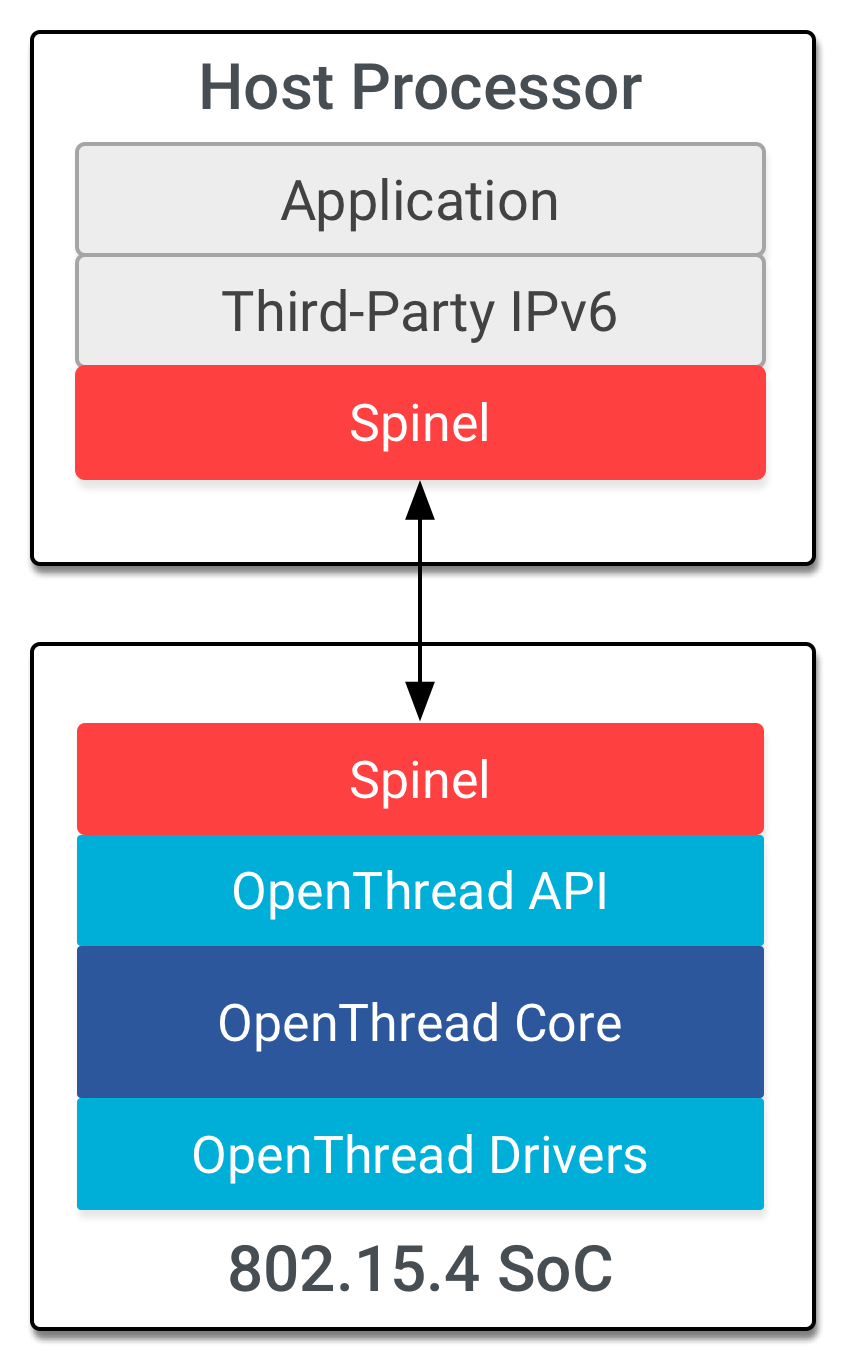
Thiết kế NCP tiêu chuẩn có các tính năng của Thread trên SoC và chạy lớp ứng dụng trên bộ xử lý máy chủ, thường có khả năng cao hơn (nhưng có nhu cầu về điện năng lớn hơn) so với thiết bị OpenThread.
Lợi ích của thiết kế này là máy chủ có công suất cao hơn có thể ở chế độ ngủ trong khi thiết bị OpenThread có công suất thấp hơn vẫn hoạt động để duy trì vị trí của thiết bị trong mạng Thread. Vì SoC không liên kết với lớp ứng dụng, nên việc phát triển và kiểm thử các ứng dụng không phụ thuộc vào bản dựng OpenThread.
Thiết kế này hữu ích cho các thiết bị cổng hoặc thiết bị có nhu cầu xử lý khác như camera IP và loa.
Giao thức Spinel
Spinel là một giao thức quản lý chung cho phép thiết bị lưu trữ giao tiếp và quản lý một bộ đồng xử lý. Được thiết kế ban đầu để hỗ trợ các NCP dựa trên Thread, Spinel được thiết kế theo phương pháp phân lớp, cho phép dễ dàng điều chỉnh theo các công nghệ mạng khác trong tương lai. Thiết kế này được dùng cho cả RCP và NCP.
Giao thức này có trong OpenThread tại /src/lib/spinel. Công cụ CLI Python có tên là Pyspinel được cung cấp cho mục đích kiểm thử.
Để biết thêm thông tin, hãy xem Bản nháp trên Internet cho Giao thức Bộ điều khiển-Máy chủ Spinel.