
OpenThread 支援共同處理器設計。建構 OpenThread 範例時,系統會自動為每個協同處理器設計建立韌體映像檔。詳情請參閱「二進位檔」。
無線電共同處理器 (RCP)
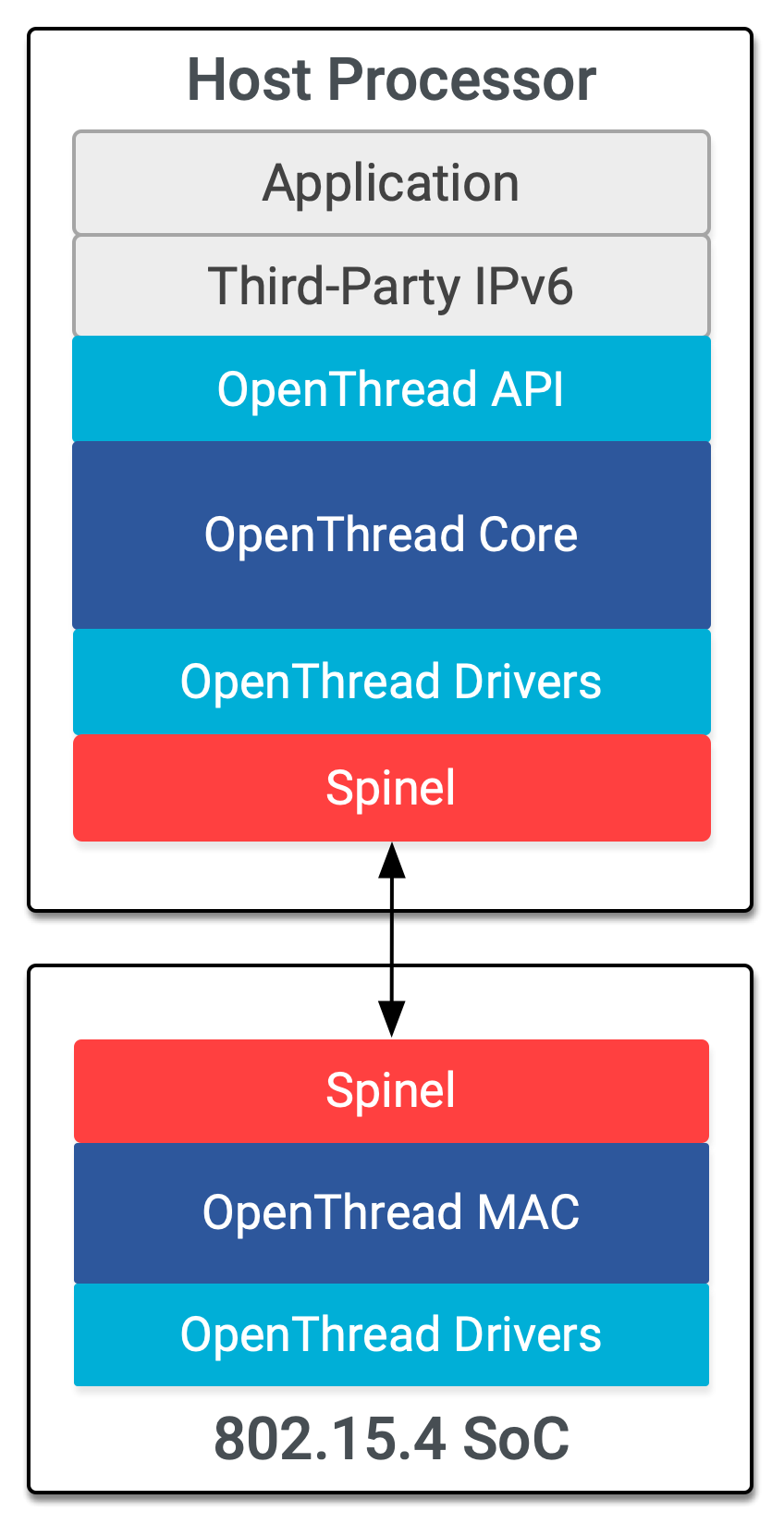
在 RCP 設計中,OpenThread 的核心位於主機處理器上,裝置上只有最少的 MAC 層「控制器」,並搭載 Thread 無線電。在這個設計中,主機處理器通常不會進入休眠狀態,部分原因是要確保 Thread 網路的可靠性。
RCP 與主機處理器之間的通訊是由 OpenThread Daemon 透過 Spinel 協定上的 SPI 介面管理。
優點是 OpenThread 可以運用功能更強大的處理器資源。
這項設計適用於對電力限制較不敏感的裝置。 舉例來說,攝影機上的主機處理器一律會開啟,以便處理影片。
OpenThread 邊界路由器支援 RCP 設計。詳情請參閱「OpenThread 邊界路由器」。
如要建構 RCP,請參閱下列程式碼研究室:
使用 nRF52840 建構 Thread 網路 Thread 邊界路由器
網路共同處理器 (NCP)
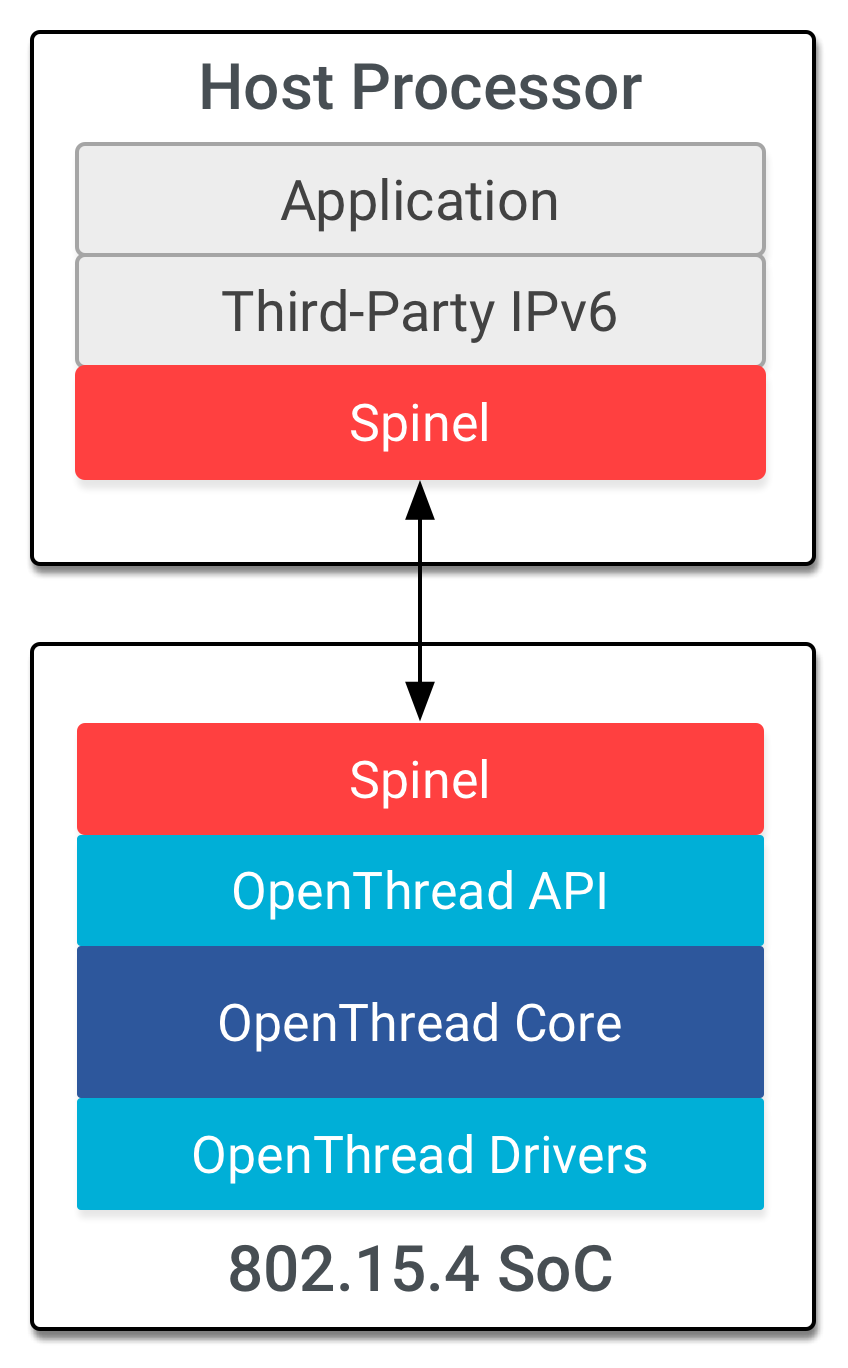
標準 NCP 設計會在 SoC 上提供 Thread 功能,並在主機處理器上執行應用程式層,這通常比 OpenThread 裝置更強大 (但耗電量較高)。
這項設計的優點是,高功率主機可以進入休眠狀態,而低功率 OpenThread 裝置則會保持運作,在 Thread 網路中維持位置。由於 SoC 與應用程式層無關,因此應用程式的開發和測試與 OpenThread 建構作業無關。
這項設計適用於閘道裝置,或有其他處理需求的裝置,例如 IP 攝影機和音箱。
Spinel 通訊協定
Spinel 是一般管理通訊協定,可讓主機裝置與協同處理器通訊及管理協同處理器。Spinel 最初的設計是支援以 Thread 為基礎的 NCP,但採用分層式設計,因此未來可輕鬆配合其他網路技術調整。這項功能適用於 RCP 和 NCP 設計。
OpenThread 隨附這項通訊協定,位於 /src/lib/spinel。您可以使用名為 Pyspinel 的 Python CLI 工具進行測試。
詳情請參閱 Spinel 主機控制器通訊協定的網際網路草案。