
Pour fournir un mécanisme configurable de détection du brouillage de signaux sur n'importe quel nœud OpenThread, activez la fonctionnalité de détection du brouillage.
Cette fonctionnalité est utile pour les certifications d'appareils qui nécessitent la capacité de détecter le brouillage de signal sur un canal spécifique. Elle peut être configurée pour répondre aux exigences de chaque type de certification.
Fonctionnement
La détection de brouillage surveille le RSSI (indicateur d'intensité du signal reçu) d'un nœud pendant des périodes spécifiques pour déterminer si le canal a été brouillé.
Lorsque la détection de brouillage est activée :
- L'état de détection du brouillage est défini sur
false. - Le nœud échantillonne le RSSI plusieurs fois à chaque intervalle d'une seconde.
- Si le RSSI reste au-dessus du seuil RSSI configuré pour chaque échantillon pendant toute la durée de l'intervalle d'une seconde, cet intervalle est considéré comme brouillé.
- Si le nombre total d'intervalles d'une seconde bloqués est supérieur ou
égal au nombre total de secondes de période d'indisponibilité configurées au cours des secondes de période de détection configurées précédentes à un moment donné, l'état de détection du brouillage à ce moment donné est défini sur
true. - Si le nombre total d'intervalles d'une seconde bloqués est inférieur au nombre total de secondes de période d'indisponibilité configurées au cours des secondes de période de détection configurées précédentes à un moment donné, l'état de détection du brouillage à ce moment donné est défini sur
false.
Bitmap de l'historique
Dans l'API OpenThread, un bitmap des 63 secondes précédentes peut être récupéré. Ce bitmap indique si le RSSI a dépassé le seuil RSSI configuré au cours de chacune des 63 secondes précédentes.
Par exemple, vous pouvez récupérer le bitmap suivant :
0xC248068C416E7FF0
La conversion en binaire produit chaque instance où le RSSI a dépassé le seuil de RSSI configuré au cours des 63 secondes précédentes :
11000010 01001000 00000110 10001100 01000001 01101110 01111111 11110000
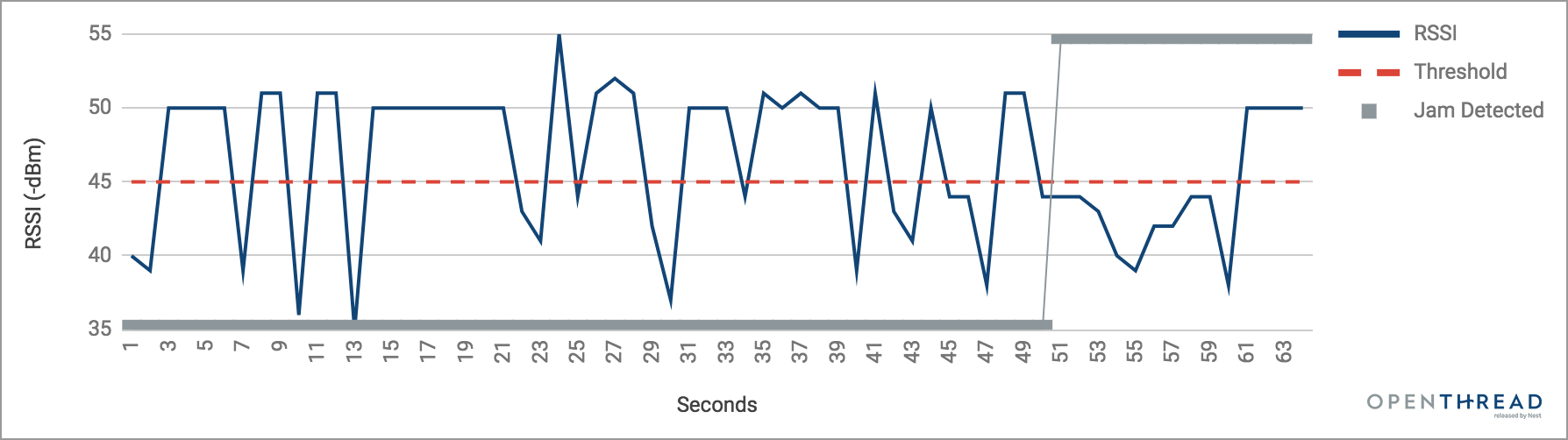
Si la période de détection est définie sur 16 secondes et la période d'occupation sur 8 secondes, l'état de détection du brouillage devient true à 51 secondes, car il s'agit de la première instance où le seuil RSSI a été dépassé pendant au moins 8 secondes entières au cours des 16 secondes précédentes. Dans cet exemple, l'état de détection de l'embouteillage reste true pendant les 13 secondes suivantes.
11000010 01001000 00000110 10001100 01000001 01101110 01111111 11110000
[00001 01101110 011] = 8 in 16
Ce bitmap peut être représenté par le graphique suivant, si -45 dBm était le seuil RSSI configuré :
Comment l'activer
Cette fonctionnalité est désactivée par défaut.
Par définition
Pour activer la détection de brouillage, définissez OPENTHREAD_CONFIG_JAM_DETECTION_ENABLE sur 1 dans le fichier openthread/src/core/config/openthread-core-default-config.h avant de créer OpenThread :
#ifndef OPENTHREAD_CONFIG_JAM_DETECTION_ENABLE
#define OPENTHREAD_CONFIG_JAM_DETECTION_ENABLE 1
#endif
Par option
Vous pouvez également utiliser l'option de compilation -DOT_JAM_DETECTION=ON lorsque vous compilez OpenThread :
./script/build -DOT_JAM_DETECTION=ON
Paramètres
Les paramètres de détection des brouillages ne peuvent être configurés que via l'API OpenThread ou le protocole Spinel. Les valeurs par défaut sont appliquées si la fonctionnalité est activée sans configuration ultérieure.
Personnalisez cette fonctionnalité à l'aide des paramètres suivants :
| Paramètres | |||||
|---|---|---|---|---|---|
| Seuil RSSI |
|
||||
| Fenêtre de détection |
|
||||
| Période d'activité |
|
||||
API
OpenThread
Utilisez l'API Jam Detection pour gérer la fonctionnalité de détection des embouteillages directement dans votre application OpenThread. L'API OpenThread fournit les fonctionnalités suivantes :
- Démarrer et arrêter la fonctionnalité
- Afficher l'état de la détection de brouillage
- Gérer tous les paramètres
- Récupérer le bitmap de l'historique de détection des embouteillages actuel
- Enregistrer une fonction de rappel pour lorsqu'un brouillage est détecté
Spinelle
Le protocole Spinel permet à un appareil hôte de communiquer directement avec un NCP.
Ce protocole expose les propriétés de détection des embouteillages dans openthread/src/lib/spinel/spinel.h, qui fournissent les fonctionnalités suivantes :
- Démarrer et arrêter la fonctionnalité
- Afficher l'état de la détection de brouillage
- Gérer tous les paramètres
- Récupérer le bitmap de l'historique de détection des embouteillages actuel
CLI
OpenThread
Il n'existe aucune commande CLI OpenThread liée à cette fonctionnalité.