
続行する前に、OpenThread ハードウェア Codelab を確認することをおすすめします。このガイドで使用する nRF52840 DK ボードをフラッシュするために必要な環境の設定とすべてのツールおよびソフトウェアのインストールについて詳しく説明しています。
OpenThread をビルドする
- OpenThread リポジトリのクローンを作成し、Thread Reference 2018-09-26 リリース コミットに切り替えます。
git clone https://github.com/openthread/openthreadcd openthreadgit checkout -b thread-reference-20180926 - GNU ツールチェーンとその他の依存関係をインストールします。
./script/bootstrap - nRF52840 のサンプルをビルドします。
USB=1スイッチは、シリアル トランスポートとしてのネイティブ USB CDC ACM を有効にします。make -f examples/Makefile-nRF52840 BORDER_AGENT=1 BORDER_ROUTER=1 COMMISSIONER=1 \ DHCP6_CLIENT=1 DHCP6_SERVER=1 JOINER=1 MAC_FILTER=1 REFERENCE_DEVICE=1 \ UDP_FORWARD=1 USB=1
NCP をフラッシュして接続する
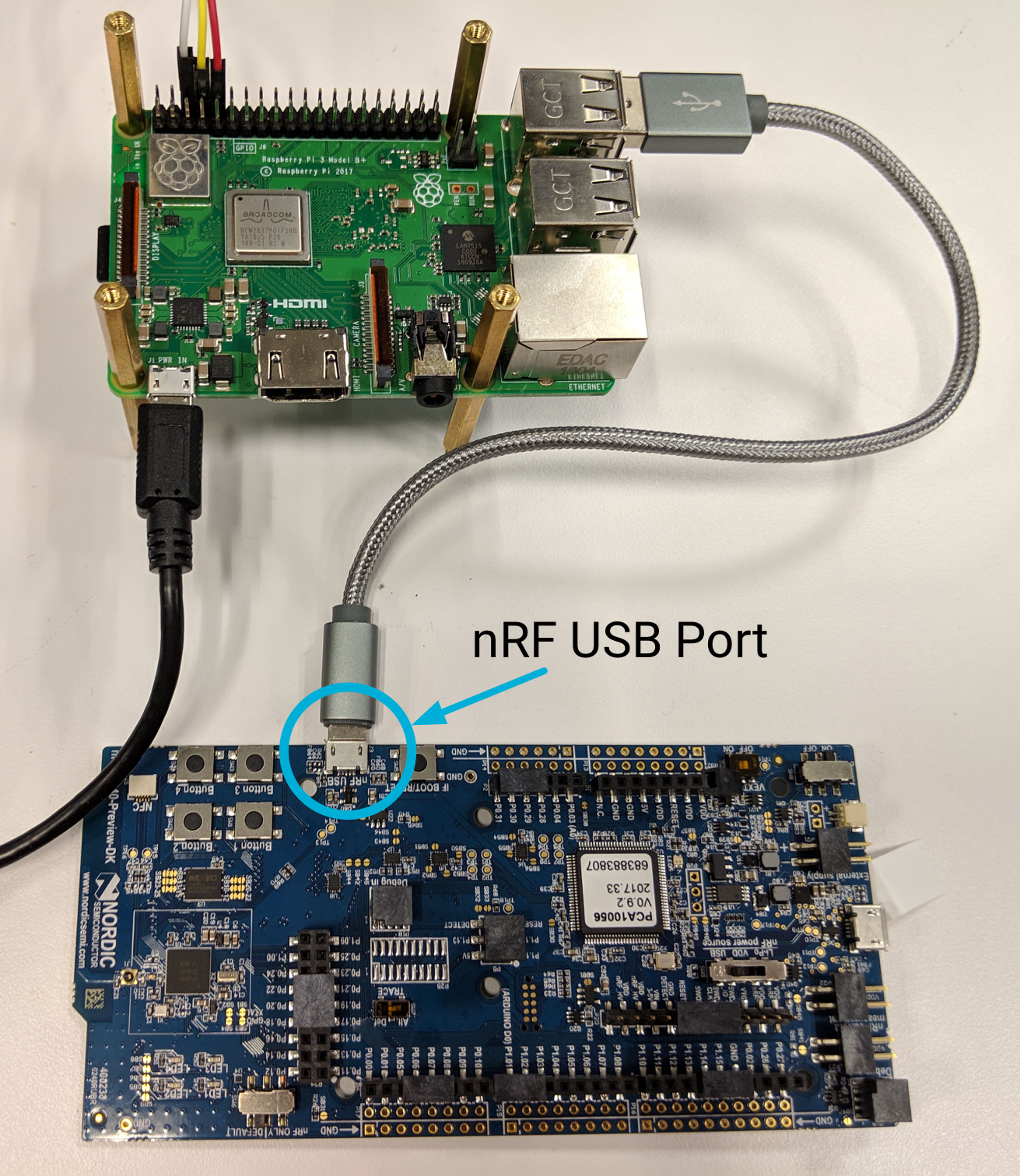
nRF52840 DK ボードを NCP としてフラッシュし、Raspberry Pi に接続する手順については、Pre-Built NCP Firmware ガイドの nRF52840 をフラッシュすると nRF52840 を接続するの手順をご覧ください。
同様の手順は、OpenThread ハードウェア Codelab にもあります。
Raspberry Pi をセットアップする
OS をインストールしてデバイスを構成する手順については、Raspberry Pi 3B(RPi3B)ボーダー ルーター プラットフォーム ページの OS のダウンロードとインストールの手順をご覧ください。
通常の RPi3B のセットアップと構成に加えて、git と推奨ユーティリティをインストールします。
sudo apt-get install git screen tcpdumpOpenThread ボーダー ルーターを設定する
- OpenThread Border Router リポジトリのクローンを作成し、Thread Certified 2018-08-19 リリース コミットに切り替えます。
git clone https://github.com/openthread/ot-br-posixcd ot-br-posixgit checkout -b thread-br-certified-20180819 - 依存関係をインストールします。
./script/bootstrap wpantundの OTBR 認証コミットを使用して、OTBR とwpantundをコンパイルしてインストールします。WPANTUND_COMMIT=8c189c6 ./script/setup/etc/wpantund.confを開き、nRF52840 DK NCP の UART ポートを更新します。Config:NCP:SocketPath '/dev/ttyACM0'
wpantundサービスを再起動します。sudo service wpantund restart
これで、ボーダー ルーターが起動して動作するようになります。OTBR の詳細については、OpenThread Border Router をご覧ください。