

OpenThread tidak bergantung pada OS dan platform, dengan Platform Abstraction Layer (PAL) yang sempit. PAL ini menentukan:
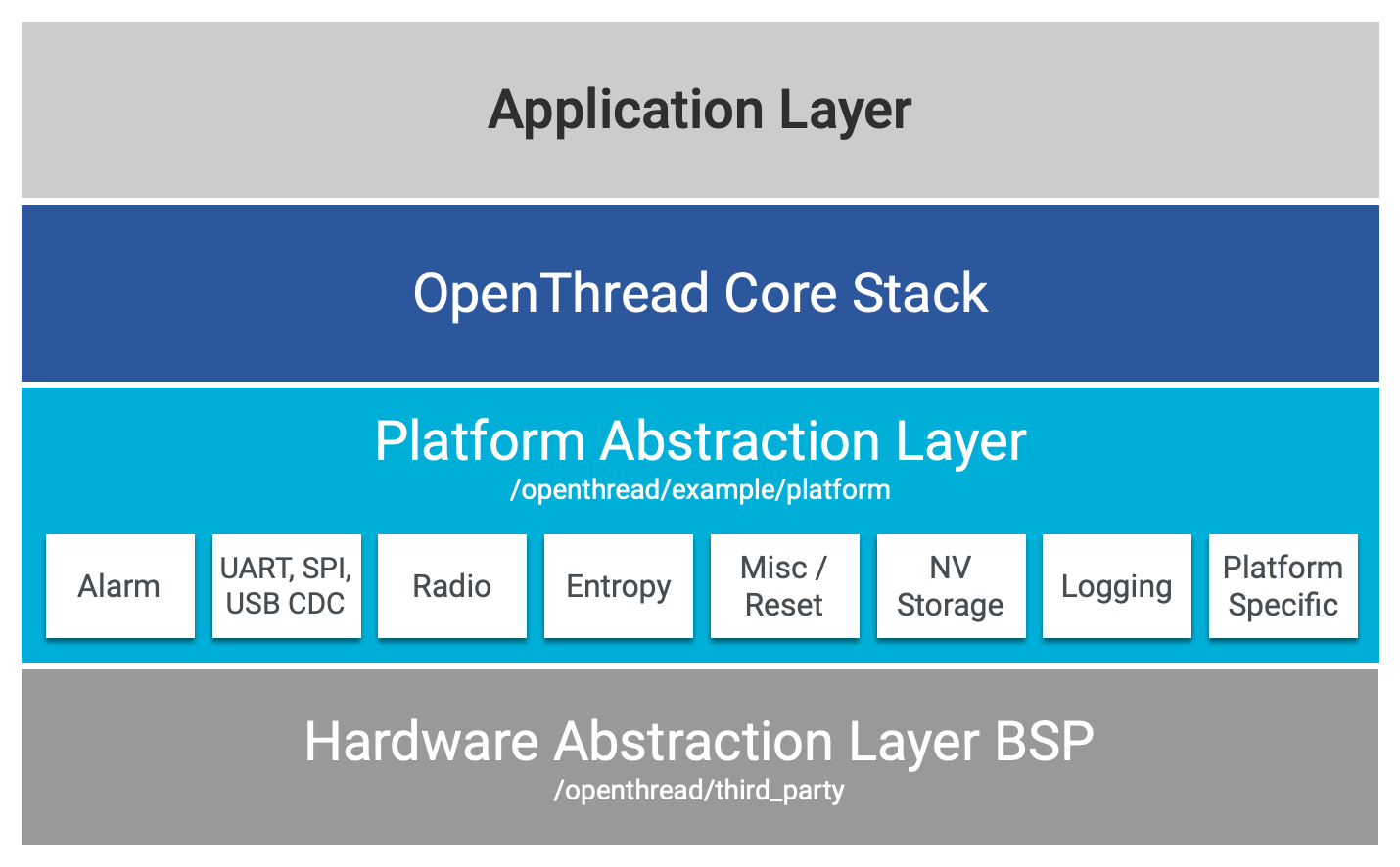
- Antarmuka alarm untuk timer berjalan bebas dengan alarm
- Antarmuka bus (UART, SPI) untuk berkomunikasi dengan pesan CLI dan Spinel
- Antarmuka radio untuk komunikasi IEEE 802.15.4-2006
- Rutinitas inisialisasi khusus GCC
- Entropi untuk pembuatan angka acak yang sebenarnya
- Layanan setelan untuk penyimpanan konfigurasi non-volatil
- Antarmuka logging untuk mengirimkan pesan log OpenThread
- Rutinitas inisialisasi khusus sistem
Semua API harus diimplementasikan berdasarkan Paket Dukungan Build (BSP) Hardware Abstraction Layer (HAL) yang mendasarinya.
File API harus ditempatkan di direktori berikut:
| Jenis | Direktori |
|---|---|
| Implementasi PAL khusus platform | /openthread/examples/platforms/platform-name |
| File header — API penyimpanan non-volatil | /openthread/examples/platforms/utils |
| Semua file header lainnya | /openthread/include/openthread/platform |
| HAL BSP | /openthread/third_party/platform-name |
Alarm
Deklarasi API:
/openthread/include/openthread/platform/alarm-milli.h
Alarm API menyediakan layanan alarm dan pengaturan waktu dasar untuk implementasi timer lapisan atas.
Ada dua jenis layanan alarm, milidetik dan mikrodetik. Milidetik diperlukan untuk platform hardware baru. Mikrodetik bersifat opsional.
UART
Deklarasi API:
/openthread/examples/platforms/utils/uart.h
UART API menerapkan komunikasi port serial dasar melalui antarmuka UART.
Meskipun add-on CLI dan NCP OpenThread bergantung pada antarmuka UART untuk berinteraksi dengan sisi host, dukungan UART API bersifat opsional. Namun, meskipun Anda tidak berencana menggunakan add-on ini di contoh platform hardware baru, sebaiknya tambahkan dukungan karena beberapa alasan:
- CLI berguna untuk memvalidasi bahwa port berfungsi dengan benar
- Alat Otomatisasi Harness menggunakan antarmuka UART untuk mengontrol OpenThread untuk tujuan pengujian dan sertifikasi
Jika platform hardware target mendukung modul USB CDC, bukan UART, pastikan untuk:
- Menginstal driver USB CDC yang benar di sisi host
- Ganti implementasi UART API dengan driver USB CDC (beserta BSP) di sisi OpenThread, menggunakan prototipe fungsi yang sama
Radio
Deklarasi API:
/openthread/include/openthread/platform/radio.h
Radio API menentukan semua fungsi yang diperlukan yang dipanggil oleh lapisan MAC IEEE 802.15.4 atas. Chip Radio harus sepenuhnya mematuhi spesifikasi IEEE 802.15.4-2006 2,4 GHz.
Karena fitur daya rendahnya yang ditingkatkan, OpenThread mewajibkan semua platform untuk
menerapkan frame otomatis yang tertunda (transmisi tidak langsung) secara default, dan tabel
pencocokan alamat sumber juga harus diterapkan dalam file sumber radio.h.
Namun, jika contoh platform hardware baru Anda dibatasi resource, tabel alamat sumber dapat ditentukan sebagai panjang nol. Lihat Auto Frame Pending untuk mengetahui informasi selengkapnya.
Lain-Lain/Reset
Deklarasi API:
/openthread/include/openthread/platform/misc.h
Misc/Reset API menyediakan metode untuk mereset software di chip, dan mengkueri alasan reset terakhir.
Entropi
Deklarasi API:
/openthread/include/openthread/platform/entropy.h
Entropy API menyediakan generator angka acak sejati (TRNG) untuk lapisan atas, yang digunakan untuk mempertahankan aset keamanan untuk seluruh jaringan OpenThread. API harus menjamin bahwa angka acak baru dihasilkan untuk setiap panggilan fungsi. Aset keamanan yang terpengaruh oleh TRNG meliputi:
- Nonce CCM AES
- Jitter tertunda acak
- Alamat yang diperpanjang perangkat
- Periode acak awal di timer trickle
- ID token/pesan CoAP
Perhatikan bahwa banyak platform telah mengintegrasikan generator angka acak, yang mengekspos API dalam paket BSP-nya. Jika platform hardware target tidak mendukung TRNG, sebaiknya manfaatkan sampling modul ADC untuk menghasilkan angka acak dengan panjang tetap. Ambil sampel dari beberapa iterasi jika diperlukan untuk memenuhi persyaratan TRNG (uint32_t).
Jika makro MBEDTLS_ENTROPY_HARDWARE_ALT ditetapkan ke 1, API ini juga harus
menyediakan metode untuk menghasilkan entropi hardware yang digunakan dalam library
mbedTLS.
Penyimpanan non-volatil
Deklarasi API:
/openthread/include/openthread/platform/flash.h
atau
/openthread/include/openthread/platform/settings.h
Persyaratan penyimpanan non-volatil dapat dipenuhi dengan menerapkan salah satu dari dua API yang tercantum di atas. Flash API mengimplementasikan driver penyimpanan flash, sedangkan Settings API menyediakan fungsi untuk implementasi operasi flash yang mendasarinya ke lapisan atas.
API ini mengekspos ke lapisan atas:
- Ukuran penyimpanan non-volatil yang tersedia yang digunakan untuk menyimpan data aplikasi (misalnya, set data operasional aktif/tertunda, parameter jaringan saat ini, dan kredensial perangkat thread untuk pemasangan ulang setelah reset)
- Operasi status flash baca, tulis, hapus, dan kueri
Gunakan OPENTHREAD_CONFIG_PLATFORM_FLASH_API_ENABLE dalam file konfigurasi
inti contoh platform Anda untuk menunjukkan API yang harus digunakan platform. Jika ditetapkan ke 1, Flash API harus diterapkan. Jika tidak, Settings API harus
diimplementasikan.
Flag ini harus ditetapkan dalam file
/openthread/examples/platforms/platform-name/openthread-core-platform-name-config.h
Anda.
Logging
Deklarasi API:
/openthread/include/openthread/platform/logging.h
Logging API mengimplementasikan fungsi logging dan debug OpenThread, dengan beberapa tingkat output debug yang tersedia. API ini bersifat opsional jika Anda tidak berencana untuk menggunakan logging OpenThread pada contoh platform hardware baru.
Level tertinggi dan paling mendetail adalah OPENTHREAD_LOG_LEVEL_DEBG, yang
mencetak semua informasi paket mentah dan mencatat baris melalui port serial atau di
terminal. Pilih tingkat debug yang paling sesuai dengan kebutuhan Anda.
Khusus sistem
Deklarasi API:
/openthread/examples/platforms/openthread-system.h
API khusus Sistem terutama menyediakan operasi inisialisasi dan deinisialisasi untuk platform hardware yang dipilih. API ini tidak dipanggil oleh library OpenThread itu sendiri, tetapi mungkin berguna untuk sistem/RTOS Anda. Anda juga dapat menerapkan inisialisasi modul lain (misalnya, UART, Radio, Random, Misc/Reset) dalam file sumber ini.
Penerapan API ini bergantung pada kasus penggunaan Anda. Jika ingin menggunakan aplikasi CLI dan NCP yang dihasilkan untuk contoh platform, Anda harus menerapkan API ini. Jika tidak, API apa pun dapat diterapkan untuk mengintegrasikan contoh driver platform ke dalam sistem/RTOS Anda.