Mô phỏng
Sử dụng bộ sưu tập để sắp xếp ngăn nắp các trang
Lưu và phân loại nội dung dựa trên lựa chọn ưu tiên của bạn.
OpenThread bao gồm các trình điều khiển nền tảng mẫu mô phỏng hoạt động giao tiếp vô tuyến giữa các thiết bị OpenThread bằng cách sử dụng các quy trình POSIX. Điều này rất hữu ích cho việc mô phỏng và kiểm thử các mạng OpenThread mà không cần phần cứng. Mô phỏng POSIX cũng được tính năng Tích hợp liên tục của OpenThread sử dụng.
Để biết ví dụ về trình điều khiển, hãy xem GitHub.
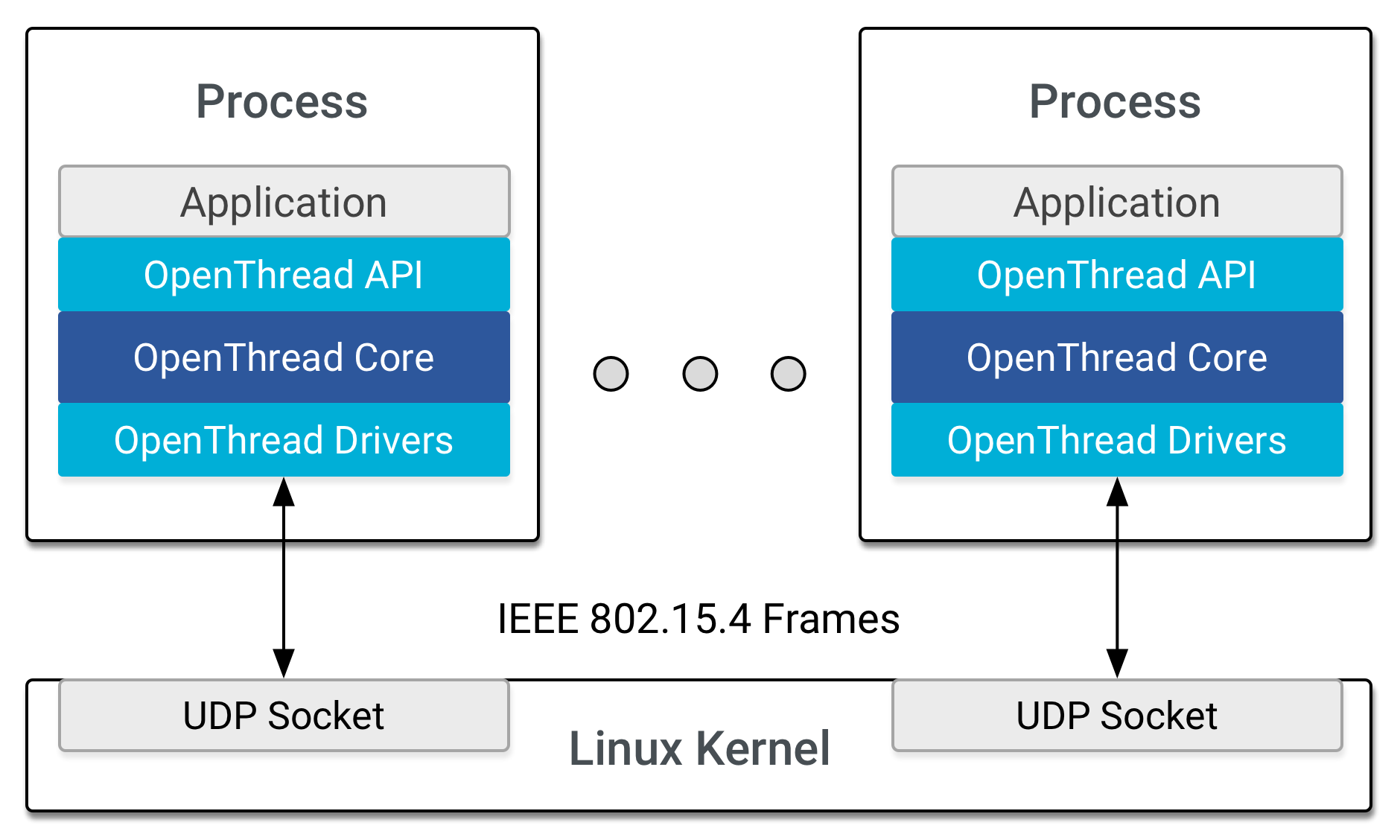
Kiến trúc
Hoạt động mô phỏng POSIX tạo một quy trình cho mỗi thiết bị, sử dụng trình điều khiển vô tuyến IEEE 802.15.4 trên các ổ cắm UDP.
Hoạt động mô phỏng được hỗ trợ trên các hệ thống dựa trên nền tảng Unix.
[[["Dễ hiểu","easyToUnderstand","thumb-up"],["Giúp tôi giải quyết được vấn đề","solvedMyProblem","thumb-up"],["Khác","otherUp","thumb-up"]],[["Thiếu thông tin tôi cần","missingTheInformationINeed","thumb-down"],["Quá phức tạp/quá nhiều bước","tooComplicatedTooManySteps","thumb-down"],["Đã lỗi thời","outOfDate","thumb-down"],["Vấn đề về bản dịch","translationIssue","thumb-down"],["Vấn đề về mẫu/mã","samplesCodeIssue","thumb-down"],["Khác","otherDown","thumb-down"]],["Cập nhật lần gần đây nhất: 2025-07-24 UTC."],[],[]]